پهپادهای کشاورزی
پهپادهای کشاورزی تولید قطعات پهپاد کشاورزی
تولید قطعات پهپاد کشاورزی قطعات پهپاد کشاورزی
قطعات پهپاد کشاورزی سری EFT Z
سری EFT Z Z50P
Z50P Z30P
Z30P سری EFT G
سری EFT G EFT G630_G620
EFT G630_G620 EFT G616
EFT G616 EFT G610
EFT G610 سری EFT E
سری EFT E EFT E616
EFT E616 EFT E610
EFT E610 اتصالات الکتریکی
اتصالات الکتریکی سیم AWG
سیم AWG کانکتور
کانکتور باطری و شارژر
باطری و شارژر باتری
باتری شارژر
شارژر سیستم پاشش
سیستم پاشش اتصالات پنوماتیک
اتصالات پنوماتیک شیلنگ
شیلنگ پمپ
پمپ نازل
نازل نازل تی حت
نازل تی حت نازل میکرونر
نازل میکرونر سیستم پیشرانش
سیستم پیشرانش موتور
موتور ملخ
ملخ کنترل
کنترل فلایت کنترل
فلایت کنترل رادیو کنترل
رادیو کنترل سنسور
سنسور مکانیک و فریم
مکانیک و فریم پرنده های آماده پرواز
پرنده های آماده پرواز پهپاد آماده پرواز سری EFT Z
پهپاد آماده پرواز سری EFT Z پهپاد آماده پرواز سری EFT G
پهپاد آماده پرواز سری EFT G پهپاد آماده پرواز سری EFT E
پهپاد آماده پرواز سری EFT E FPV
FPV موتور براشلس
موتور براشلس فریم
فریم ملخ
ملخ VTOL
VTOL Manned Aircraft
Manned Aircraft دینامیک ربات
دینامیک ربات ابزار
ابزار مکانیک
مکانیک الکترونیک
الکترونیک
بررسی منوی تنظیمات نرم افزار Agri Assistent قسمت اول (بخش سوم)
با رشدسریع تکنولوژی، پهپادها به عنوان یکی از ابزارهای مهم در صنعت کشاورزی شناخته شدهاند. این تکنولوژی پیشرفته میتواند در حوزه سمپاشی زمین ها به کشاورزان کمک شایانی کند. با این حال، بهرهبرداری بهینه از این پهپادها مستلزم تنظیمات دقیق و هوشمند نرمافزارهای کنترل و مدیریت آنها است. بدون این تنظیمات درست، نمیتوان از تمامی قابلیتها و پتانسیلهای این تکنولوژی استفاده کرد و ممکن است عملکرد مورد انتظار حاصل نشود. بنابراین، برای بهرهبرداری کامل از پهپادهای کشاورزی، لازم است که این ابزارها با دقت و مطابق با نیازهای خاص زمین های کشاورزی تنظیم شوند.
در این مقاله، به بررسی جزئیات و اهمیت تنظیمات نرمافزار Agri Assitent پرداخته میشود تا بتوانیم به شما کمک کنیم که از پهپادهای خود حداکثر کارایی را در شرایط مختلف کشاورزی به دست آورید.
این مقاله به موضوعاتی مانند کالیبراسیون سنسورها، تنظیمات باتری، اسپری و دیگر پارامترهای پروازی پرداخته و راهکارهایی برای بهبود عملکرد و افزایش ایمنی در عملیات کشاورزی ارائه میدهد. علاوه بر این، به بررسی حالتهای مختلف پروازی مانند “Fail-Safe” و “Back Mode” نیز خواهیم پرداخت که میتوانند به افزایش امنیت و کارایی سمپاشی زمین های کشاورزی کمک کنند.
همچنین،در این مقاله به سوالاتی که ممکن است هنگام استفاده از نرم افزار Agri Assistent و تنظیمات آن برای شما پیش آید پاسخ داده شده است. این بخش به شما کمک خواهد کرد تا به راحتی به تنظیمات صحیح دست یابید و از مشکلات احتمالی جلوگیری کنید. با رعایت نکات این مقاله، میتوانید بهرهوری خود را افزایش داده و از پهپادها به صورت بهینه در سمپاشی استفاده کنید.
سوالات متداول :
- زمانی که اتصال رادیو کنترل با پهپاد قطع میشود،چه باید کرد؟
- شتابسنج چیست و چرا باید کالیبره شود؟
- قطب نما سنج چیست و چرا باید کالیره شود ؟
- زمانی که آلارم هشدارباتری فعال می شود وضعیت پهپاد به چه صورت است ؟
- چگونه میتوان ولتاژ واقعی باتری را با ولتاژ نمایش دادهشده در رادیو کنترل تنظیم کرد؟
- چگونه به جای نمایش ولتاژ باتری به صورت ولت، آن را به صورت درصد مشاهده کنید؟
- اگر محلول در مخزن تمام شود وضعیت پهپاد به چه صورت است ؟
- به چه صورت فلومتر را کالیبره کنیم ؟
بخش تنظیمات :
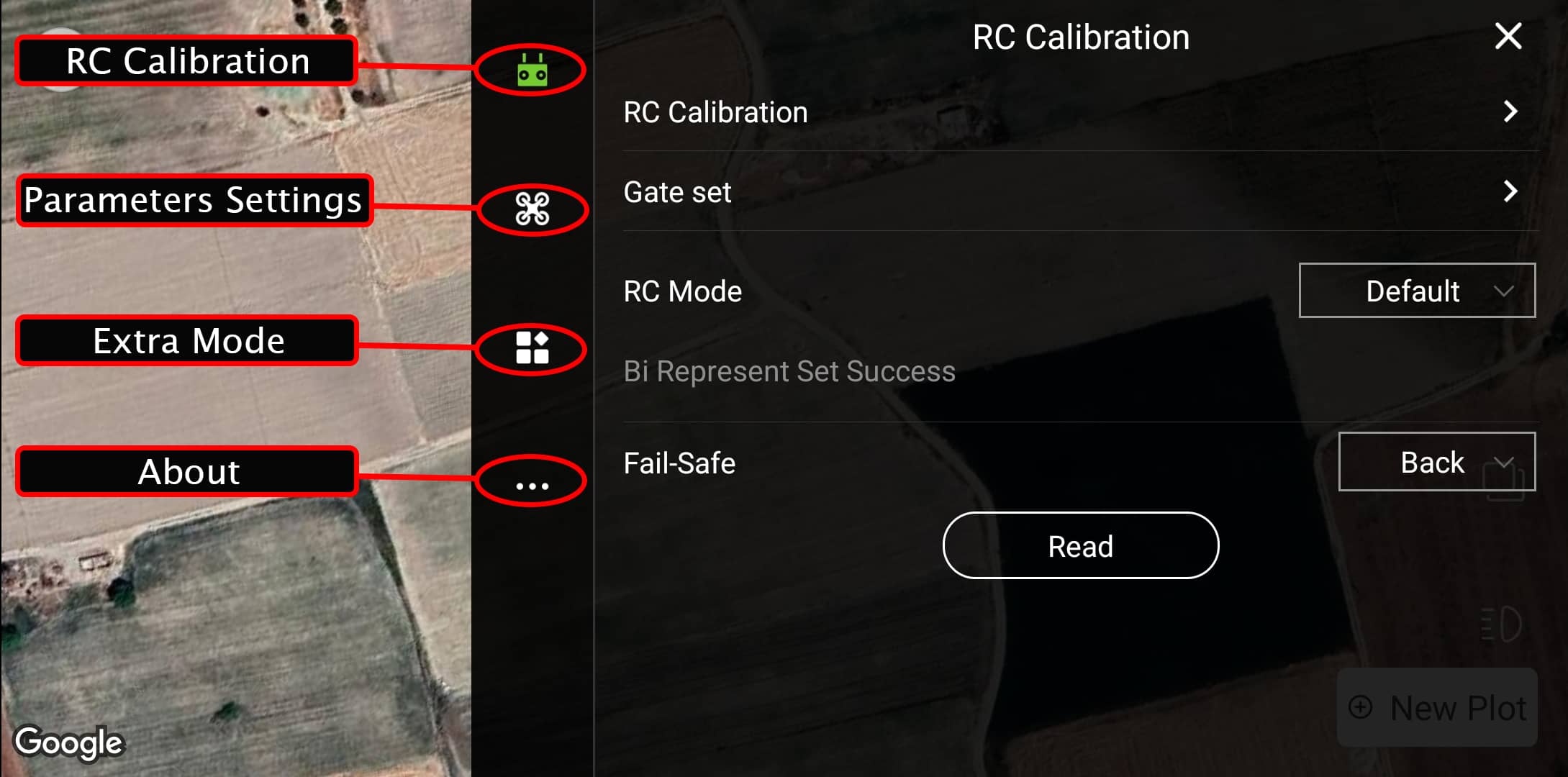
برای وارد شدن به بخش تنظیمات نرمافزار، ابتدا روی گزینه “Start،Ground Plan” کلیک کنید. سپس، روی سه نقطهای که در گوشه سمت راست نرمافزار قرار دارد، کلیک کنید تا وارد بخش تنظیمات نرمافزار شوید.
RC Calibration
Parameter Settings
Extension Module
About
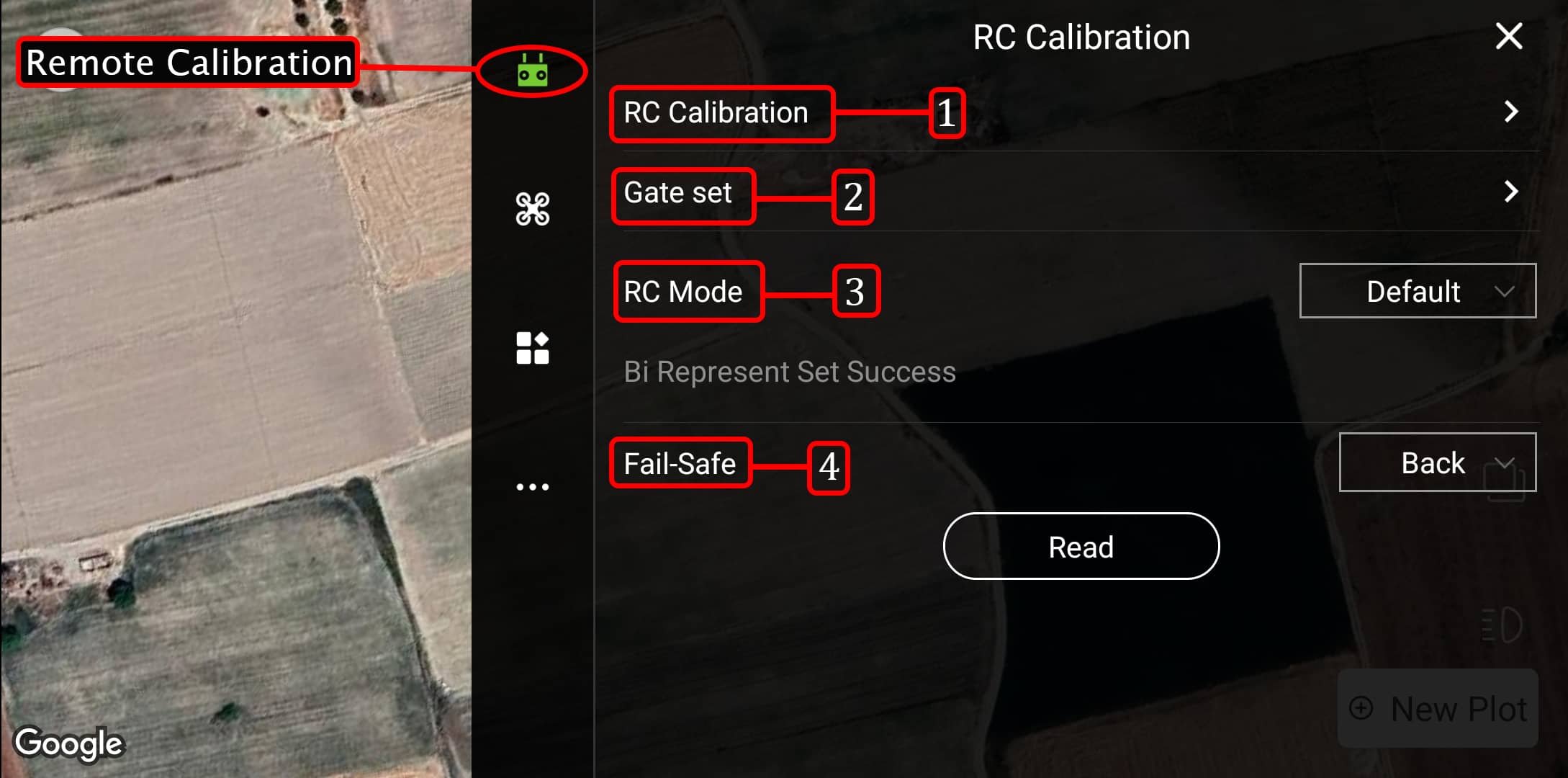
RC Calibration :
کالیبراسیون RC تنظیم دقیق کنترلکننده رادیویی و گیرنده پهپاد برای اطمینان از عملکرد صحیح و دقت دستورات است. این فرآیند شامل تنظیم دقیق مدهای پروازی (Roll, Pitch, Throttle, Yaw) و اطمینان از اینکه سیگنالهای ارسالی به درستی دریافت و اعمال میشوند.
رابط تنظیم کنترل از راه دور به چند بخش اصلی تقسیم میشود که عبارتند از :
- RC Calibration
- Gate Set
- RC Mode
- Fail-Safe
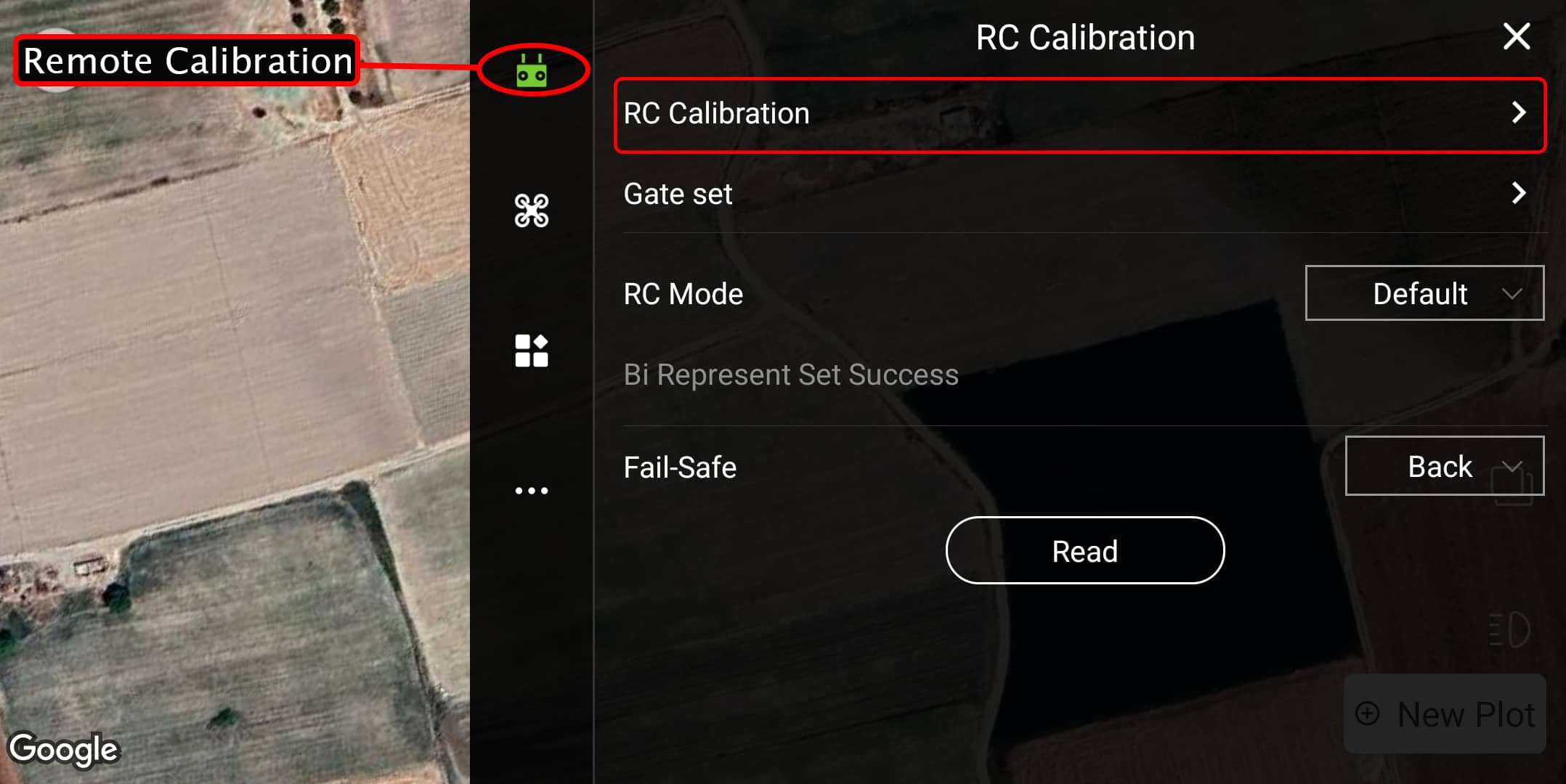
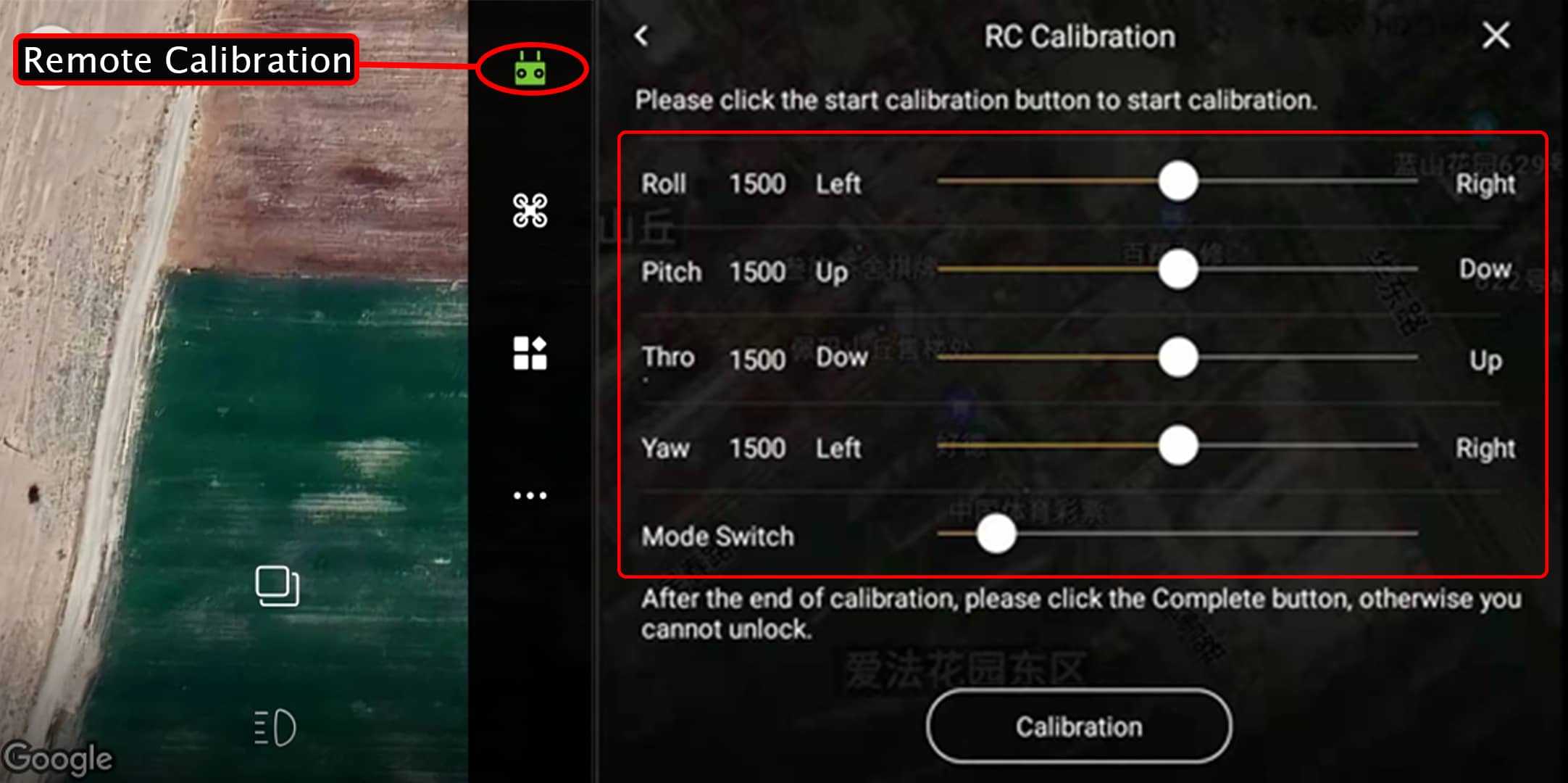
RC Calibration :
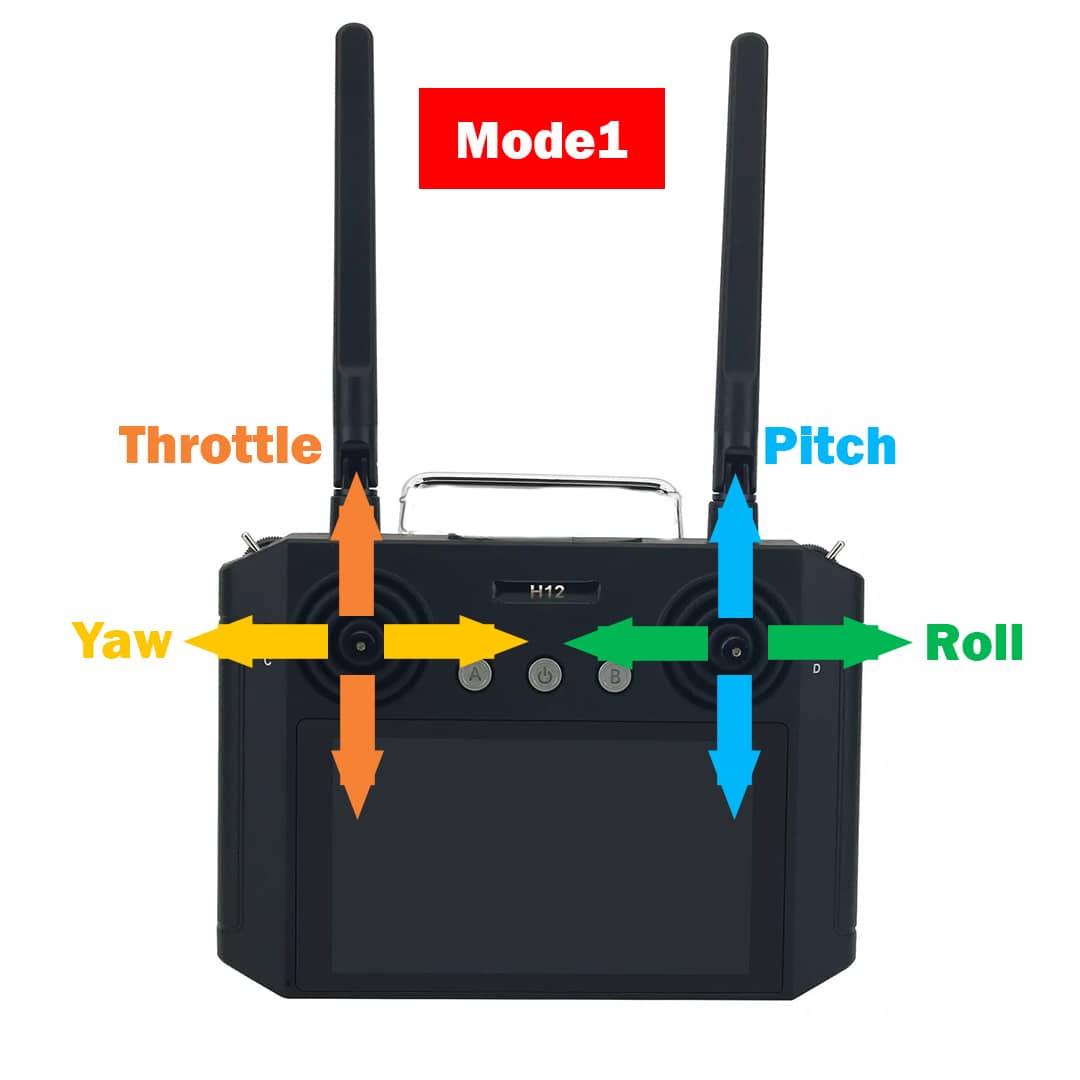
با کلیک بر روی گزینه RC Calibration، به صفحهای هدایت میشوید که در آن تمام کانالهای جوی استیک رادیو کنترل از جمله : Roll، Pitch،Throttle وYaw قابل مشاهده هستند.
دستورات کنترلی پهپاد با رادیو کنترل :
پهپادهای کشاورزی، مانند سایر پهپادها، برای کنترل پرواز خود از یک سیستم کنترل چندکاناله استفاده میکنند که هر کانال برای تنظیم یک جنبه خاص از حرکت و پایداری پهپاد طراحی شده است. این سیستمها معمولاً از چهار کانال اصلی برای کنترل وضعیتهای مختلف پروازی استفاده میکنند. این ویژگی به اپراتور اجازه میدهد تا دقیقتر و راحتتر پهپاد را در زمین های کشاورزی مدیریت کرده و عملیات مختلف را انجام دهد :
Roll : (چرخش حول محور عرضی)
Pitch : (چرخش حول محور طولی)
Throttle : (تنظیم توان موتور)
Yaw : (چرخش حول محور عمودی)
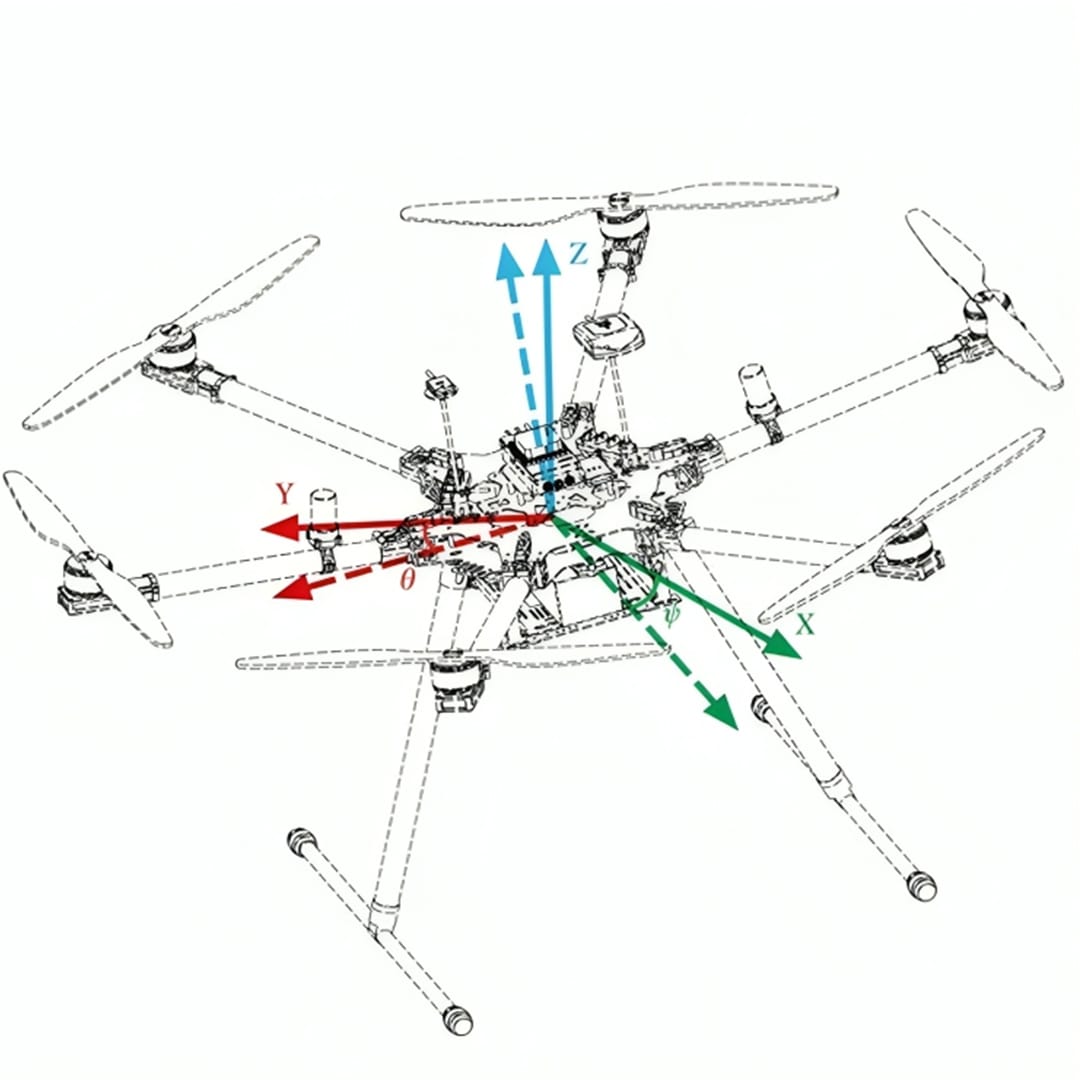
نمودار دکارتی :
در یک نمودار دکارتی سه بعدی، معمولاً از محورهای X، Y و Z برای نمایش موقعیت و حرکت یک شیء در فضا استفاده میشود. در مورد پهپادها، میتوانیم این محورها را به صورت زیر تفسیر کنیم :
- محور X (محور عرضی) : به طور معمول، محور X برای نمایش حرکت پهپاد به سمت چپ و راست استفاده میشود. این حرکت به عنوان حرکت عرضی شناخته میشود.
- محور Y (محور طولی) : محور Y معمولاً برای نمایش حرکت پهپاد به سمت بالا و پایین استفاده میشود. این حرکت به عنوان حرکت طولی شناخته میشود.
- محور Z (محور عمودی) : محور Z برای نمایش حرکت دورانی پهپاد حول محور عمودی خود استفاده میشود. این حرکت به عنوان حرکت عمودی شناخته میشود و باعث میشود پهپاد به سمت چپ یا راست بچرخد.
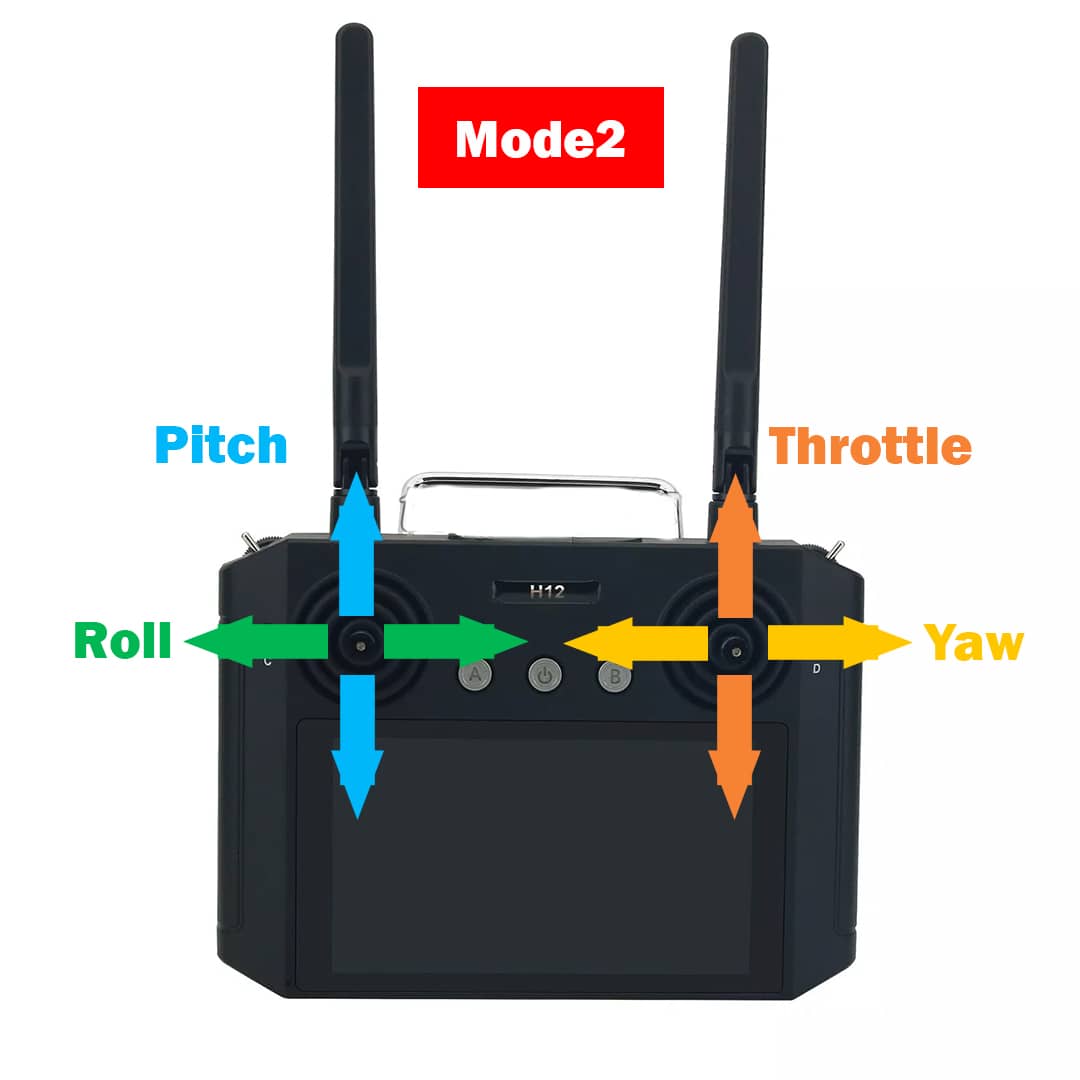
پس هر کدام از این کانالها نقش خاصی در کنترل پهپاد ایفا میکنند.در رادیو کنترل پهپاد، جوی استیک سمت چپ برای کنترل Yaw و Throttle و جوی استیک سمت راست برای کنترل Roll و Pitch استفاده میشود.
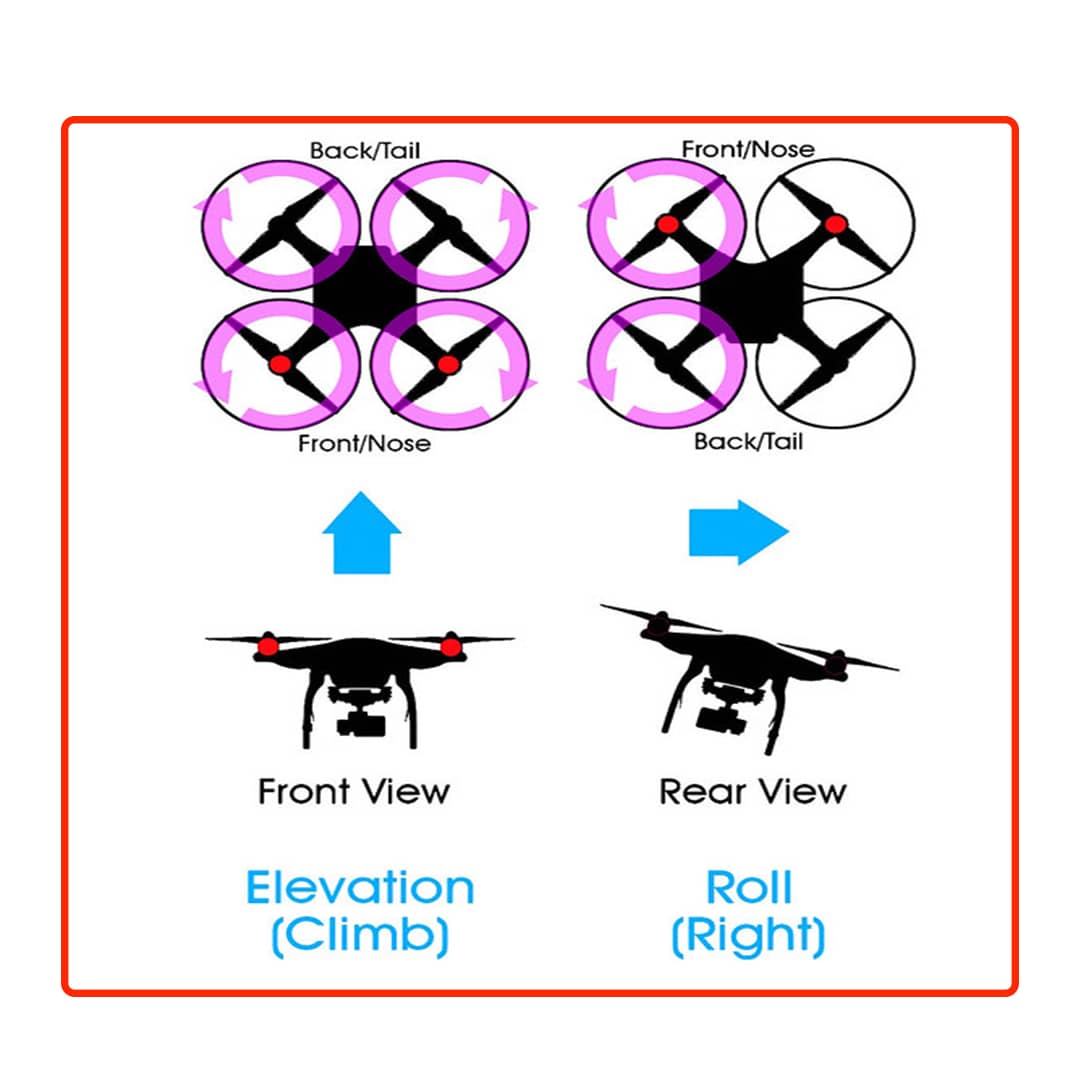
Roll : به حرکت چرخشی پهپاد حول محور عرضی (محور X) آن گفته میشود. تصور کنید که پهپاد مانند یک هواپیما است که بالهای آن به سمت چپ یا راست متمایل میشود. این حرکت برای تغییر جهت پهپاد به چپ یا راست بدون تغییر در جهت عمودی (ارتفاع) یا افقی (جلو و عقب) آن استفاده میشود.
- Roll با حرکت جویاستیک سمت راست به چپ یا راست کنترل میشود. وقتی جویاستیک سمت راست به سمت چپ حرکت داده میشود، پهپاد به سمت چپ متمایل میشود و اگر جویاستیک به سمت راست حرکت داده شود، پهپاد به سمت راست متمایل میشود.
- تغییر در Roll باعث میشود که پهپاد حول محور عرضی (محور X) خود بچرخد و در نتیجه، زاویهی افقی آن تغییر کند.
- Roll تأثیری بر ارتفاع یا سرعت حرکت عمودی پهپاد ندارد. این حرکت تنها بر جهت حرکت پهپاد به سمت چپ یا راست در راستای افقی تأثیر میگذارد.
مثال :
فرض کنید شما در حال پرواز به سمت جلو هستید و میخواهید پهپاد را به سمت چپ متمایل کنید. برای این کار، جویاستیک سمت راست را به سمت چپ حرکت میدهید. این کار باعث میشود که پهپاد حول محور عرضی خود بچرخد و به سمت چپ متمایل شود. برعکس، اگر جویاستیک را به سمت راست حرکت دهید، پهپاد به سمت راست متمایل میشود.
نکته : جهت پرواز پهپاد کشاورزی باید همسو با جهت ایستادن اپراتور باشد. در غیر این صورت، فرمانهای کنترل برعکس عمل میکنند. به عنوان مثال، اگر پهپاد نسبت به اپراتور 360 درجه چرخیده باشد و شما جوی استیک را به سمت راست حرکت دهید، پهپاد به سمت چپ خواهد رفت. این وضعیت میتواند به خطاهای جدی منجر شود. برای جلوگیری از این مشکل، همیشه باید رو به روی پهپاد بایستید و از قرار دادن سر پهپاد رو به روی خود اجتناب کنید.
تصاویر زیر به شما کمک میکنند تا عملکرد هر یک از این حالتها را بهتر درک کنید.
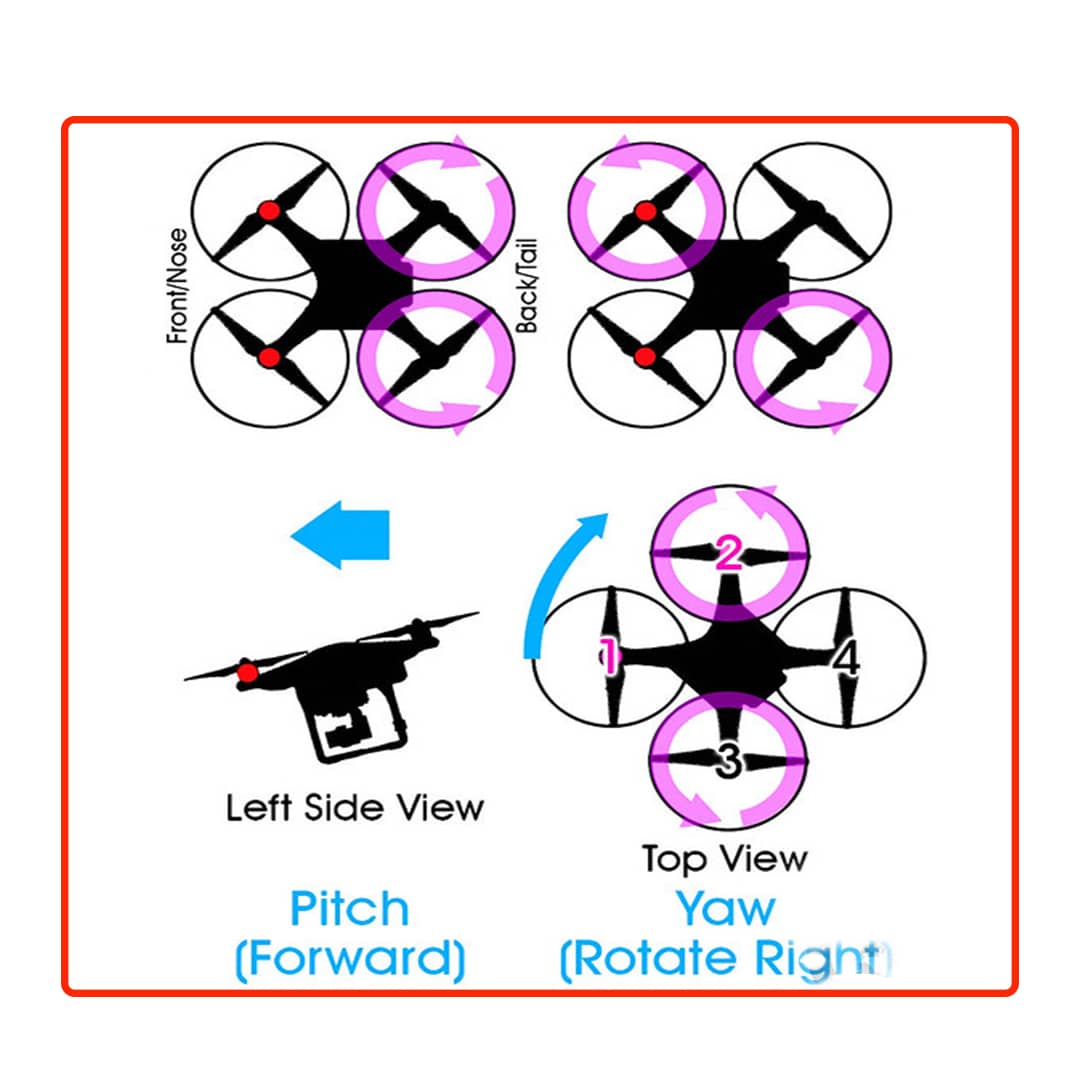
Pitch : به حرکت چرخشی پهپاد حول محور طولی (محور Y) آن گفته میشود. تصور کنید که پهپاد مانند یک هواپیما است که سر آن به بالا یا پایین میرود. این حرکت برای تغییر زاویهی پروازی پهپاد و حرکت آن به جلو یا عقب استفاده میشود.
- Pitch با حرکت جویاستیک سمت چپ به جلو یا عقب تغییر میکند. وقتی جویاستیک به جلو حرکت داده میشود، سر پهپاد به سمت پایین میرود و باعث میشود پهپاد به جلو حرکت کند. برعکس، وقتی جویاستیک به عقب حرکت داده میشود، سر پهپاد به سمت بالا میرود و پهپاد به عقب حرکت میکند.
- با تغییر زاویه Pitch، پهپاد میتواند حرکت افقی به جلو یا عقب داشته باشد.
- تغییر Pitch با تغییر Throttle (قدرت موتور) متفاوت است. Throttle برای تغییر ارتفاع استفاده میشود، در حالی که Pitch برای تغییر جهت پرواز افقی است.
مثال :
فرض کنید شما در حال پرواز در ارتفاع ۵ متری هستید و میخواهید پهپاد را به جلو حرکت دهید. برای این کار، جویاستیک سمت چپ را به جلو حرکت میدهید. این کار باعث میشود که Pitch تغییر کرده و سر پهپاد به سمت پایین متمایل شود، که نتیجه آن حرکت پهپاد به سمت جلو خواهد بود. اگر جویاستیک را به عقب حرکت دهید، پهپاد به عقب حرکت میکند.
Yaw : به حرکت چرخشی پهپاد حول محور عمودی (محور Z) آن گفته میشود. تصور کنید که پهپاد مانند یک دروازهبان در حال چرخش به چپ و راست است، بدون اینکه مسیر حرکت اصلی آن تغییر کند. این حرکت برای چرخاندن پهپاد به چپ یا راست، بدون تغییر در جهت حرکت عمودی یا افقی اصلی آن استفاده میشود.
- وقتی جویاستیک سمت راست را به چپ یا راست حرکت میدهید، پهپاد حول محور عمودی خود میچرخد و جهت جلوی آن تغییر میکند، اما حرکت رو به جلو یا عقب (مربوط به Pitch است) یا حرکت به سمت چپ یا راست (مربوط به Roll است) تغییر نخواهد کرد.
- Yaw به این دلیل که فقط جهت چرخش را تغییر میدهد، در کنترل دقیق مسیر پرواز و جلوگیری از انحرافات بسیار اهمیت دارد.
مثال :
اگر شما بخواهید پهپاد را به سمت چپ بچرخانید، جویاستیک سمت راست را به چپ حرکت میدهید، و پهپاد حول محور عمودی خود میچرخد تا به چپ بچرخد. در این فرآیند، پهپاد همچنان در همان مسیر پرواز خود باقی میماند، تنها جهت رو به جلوی آن تغییر میکند.
Throttle :
- زمانی که شما جویاستیک سمت چپ را به سمت بالا حرکت میدهید، قدرت موتور افزایش پیدا میکند و پهپاد شروع به بلند شدن میکند.
- وقتی جویاستیک را به سمت پایین حرکت میدهید، قدرت موتور کاهش مییابد و پهپاد شروع به پایین آمدن میکند.
- اگر جویاستیک در حالت میانه یا صفر قرار گیرد، موتورها در یک حالت ثابت کار میکنند و پهپاد در وضعیت معلق قرار میگیرد (مثلاً معلق در هوا در ارتفاع مشخص).
- Throttle در پهپادها به میزان قدرت موتورهای دستگاه گفته میشود. این پارامتر تعیین میکند که موتورهای پهپاد با چه سرعتی بچرخند و در نتیجه قدرت عمودی برای بلند شدن یا پایین آمدن پهپاد چقدر باشد. در حقیقت، Throttle کنترل کننده ارتفاع پهپاد است.
- هرچه Throttle بیشتر باشد، پهپاد سریعتر به سمت بالا حرکت میکند و هرچه کمتر باشد، پهپاد سریعتر به سمت پایین میآید.
- Throttle درواقع گاز دادن به موتور است. اگر خیلی زیاد شود، میتواند باعث افزایش سرعت حرکت پهپاد در ارتفاع نیز بشود.
- Throttle تنها بر حرکت عمودی تاثیر میگذارد، نه بر حرکت افقی یا چرخش پهپاد.
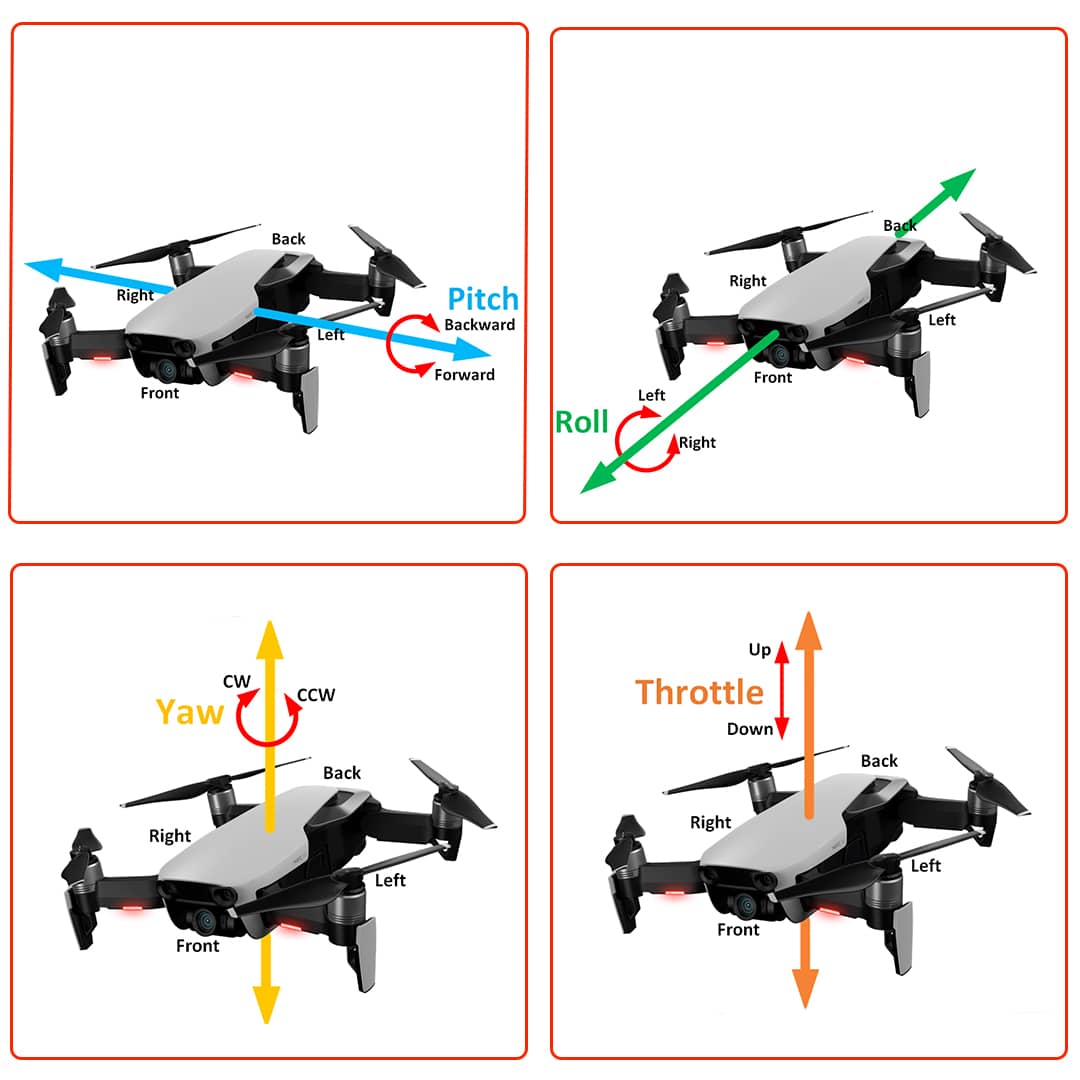
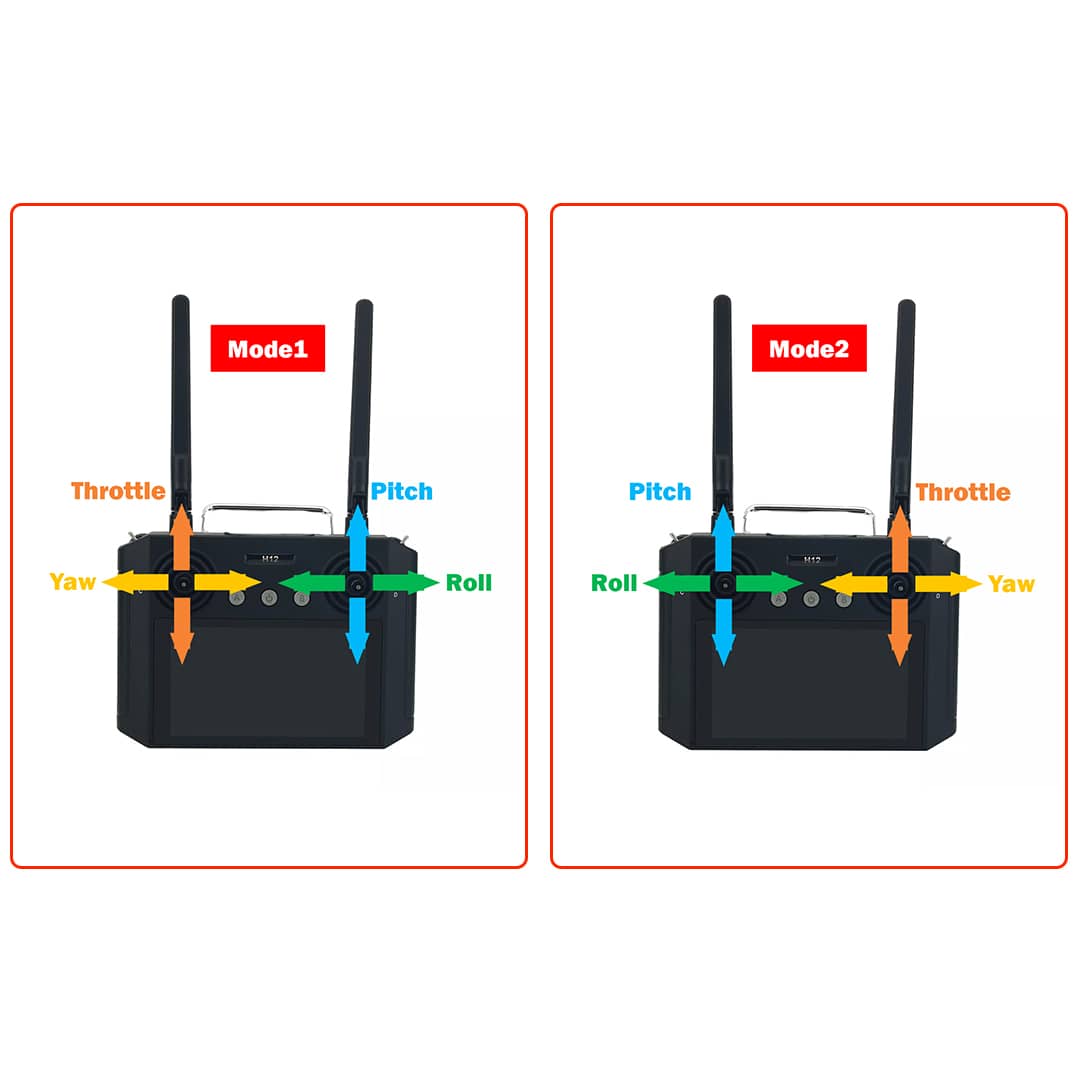
نحوه تغییر حالتهای پهپادها را میتوانید در این تصویر مشاهده کنید.
نحوه کالیبره جوی استیک های رادیو کنترل :
برای آغاز کالیبراسیون، بر روی دکمه Calibration کلیک کنید.
برای کالیبراسیون دو راهکار وجود دارد :
- روش اول : برای ارزیابی دقیق عملکرد جویستیکها، آنها را به صورت دایرهای کامل و با بیشترین فشار ممکن بچرخانید. در این تست، تمامی پارامترهای خروجی از جمله :(Roll، Pitch،Throttle،Yaw) باید به طور همزمان و متناسب با حرکت جویستیکها تغییر کنند. محدوده استاندارد مقادیر این پارامترها بین 1050 تا 1950 واحد بوده و مقدار مرکزی 1500 است. اگر جویستیکها نتوانند تمام محدوده مقادیر 1050 تا 1950 را پوشش دهند، نشاندهنده وجود ایراد در آن است. بنابراین، به دقت تغییرات اعداد نمایش داده شده روی رادیو کنترل را رصد کنید.
- روش دوم : به جای اینکه جویاستیکها را به صورت 360 درجه حرکت دهید و تغییرات را در تمام محورها اعمال کنید، شما میتوانید از جویاستیکها برای تغییر هر کدام از مدهای (مثل Yaw، Pitch، Roll و …) استفاده کنید. به عبارت دیگر، شما با هر حرکت جویاستیک به سمت راست یا چپ (یا بالا یا پایین) فقط یکی از این مدها را تغییر میدهید.این تغییرات نشاندهندهی تنظیمات و تغییرات ورودی جویاستیکها در فرآیند کالیبراسیون است.
پس از آنکه تمام کانالها کالیبره شده و در بازه 1500 قرار گرفتند، وارد مرحلهی تغییر حالت Mode Switch میشویم. در این مرحله، با تنظیم بازه، حالت Mode Switch بین مقادیر بالا، پایین و میانه تغییر میکند. پس حالت Mode Switch را ابتدا به بالاترین مقدار ممکن رسانده و سپس به حالت مرکزی باز میگردانیم. این فرایند دو تا سه بار تکرار میشود تا اطمینان حاصل شود که تغییر حالت به درستی انجام شده است. در نهایت، با کلیک بر روی گزینه Get Mode، فرایند کالیبراسیون تکمیل شده و پیام Calibration Complete نمایش داده میشود.
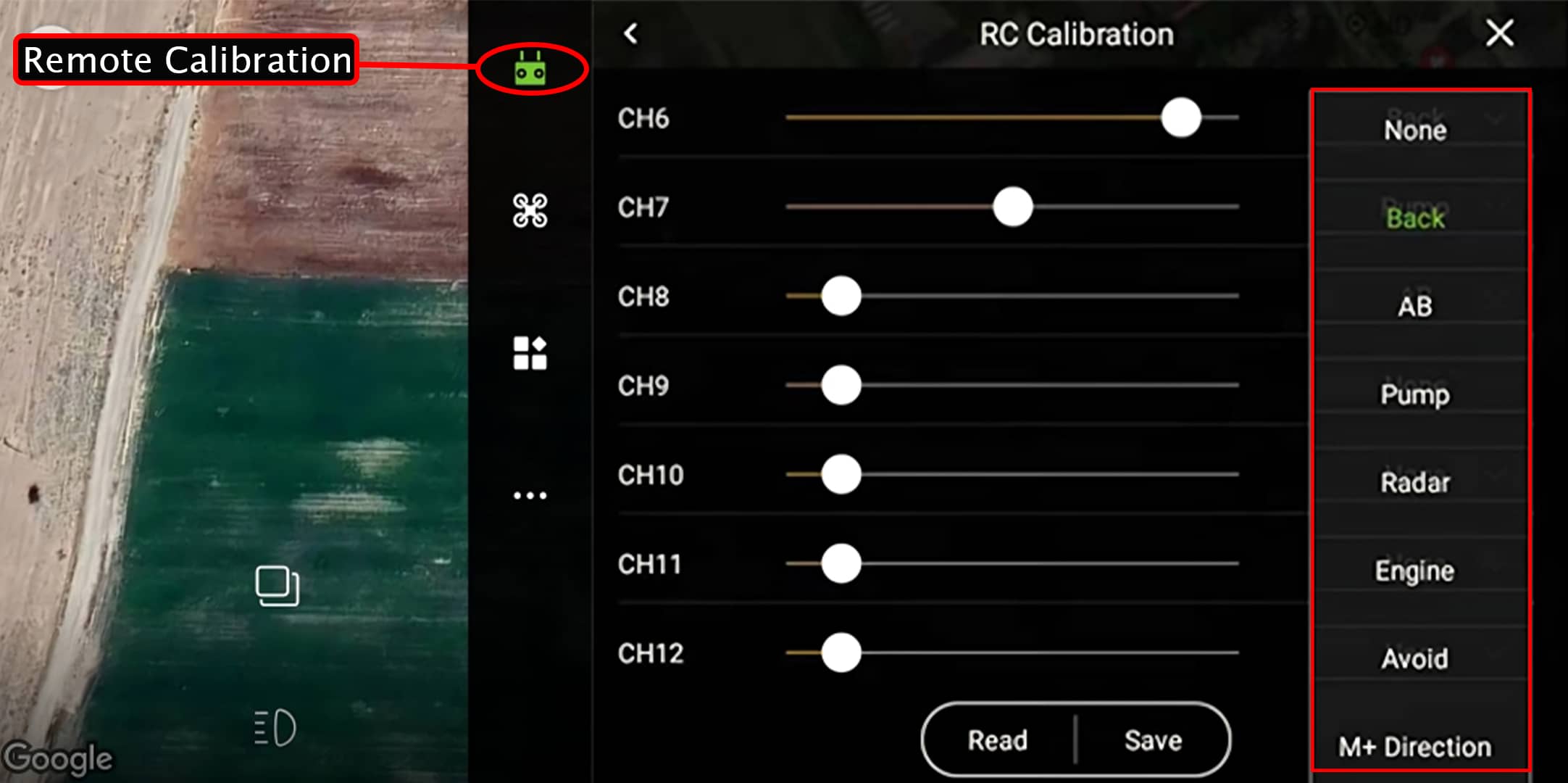
Gate Set :
امکان تنظیمات سفارشی برای کانالهای مختلف پهپاد را فراهم میآورد. این قابلیت، با هدف فرآیند عملیات و افزایش کارایی اپراتور طراحی شده است.
با کلیک بر روی گزینه “Gate Set”، کاربر با محیطی مشابه تصویر زیر روبه رو خواهد شد.
در این بخش میتوانید برای هر کانال،تنظیمات خاصی را تعریف کنید تا در هر زمان که به آنها نیاز داشتید،سریعتر و راحتتر به هر یک از موارد کانالی دسترسی پیدا کنید.
به عنوان مثال : در این بخش ،2 مورد را برای شما مثال زدیم تا بتوانید از عملکرد این بخش آگاه شوید.
رادار ارتفاعسنج(Altitude Radar) :
این رادار برای اندازه ارتفاع پهپاد از سطح زمین استفاده میشود.کانالی که برای رادار ارتفاع تعریف میکنید، به شما این امکان را میدهد که در هر زمان با فشردن دکمه مورد نظر،رادار را فعال یا غیر فعال کرده، یا در این قسمت آن را روشن یا خاموش کنید.
رادارجلوگیری از موانع(Avoidance) :
این رادار برای تشخیص وجلوگیری از موانع در مسیر حرکت پهپاد طراحی شده است.برای کنترل این رادار هم میتوان کانال خاصی را تعریف کرد که به وسیله آن میتوانید از برخورد پهپاد با موانع آن را فعال یا غیر فعال کنید.زمانی که با مانعی روبهرو میشوید، فعال کردن این کانال به شما دسترسی سریع تری میدهد که سیستم بهطور خودکار از برخورد جلوگیری کند.
⚠️نکته : در صورتی که هیچ کانالی تعریف نشده باشد گزینه “None”،برای شما نمایش داده می شود.
از دیگر قابلیتهای این بخش میتوان به امکان حذف کانالهای اضافی و تغییر نام کانالها اشاره کرد که به شخصیسازی بیشتر محیط کاربری کمک مینماید.
لطفاً دقت کنید که در هر کدام از منوها، اگر بخواهید تنظیماتی که روی پهپاد اعمال شده را مشاهده کنید، ابتدا باید گزینه Read را بزنید. در این حالت، تنظیمات موجود روی پهپاد خوانده میشود. اگر نیاز به تغییر تنظیمات داشتید، پس از انجام تغییرات لازم، حتماً گزینه Save را بزنید تا تنظیمات جدید روی پهپاد ذخیره شود.
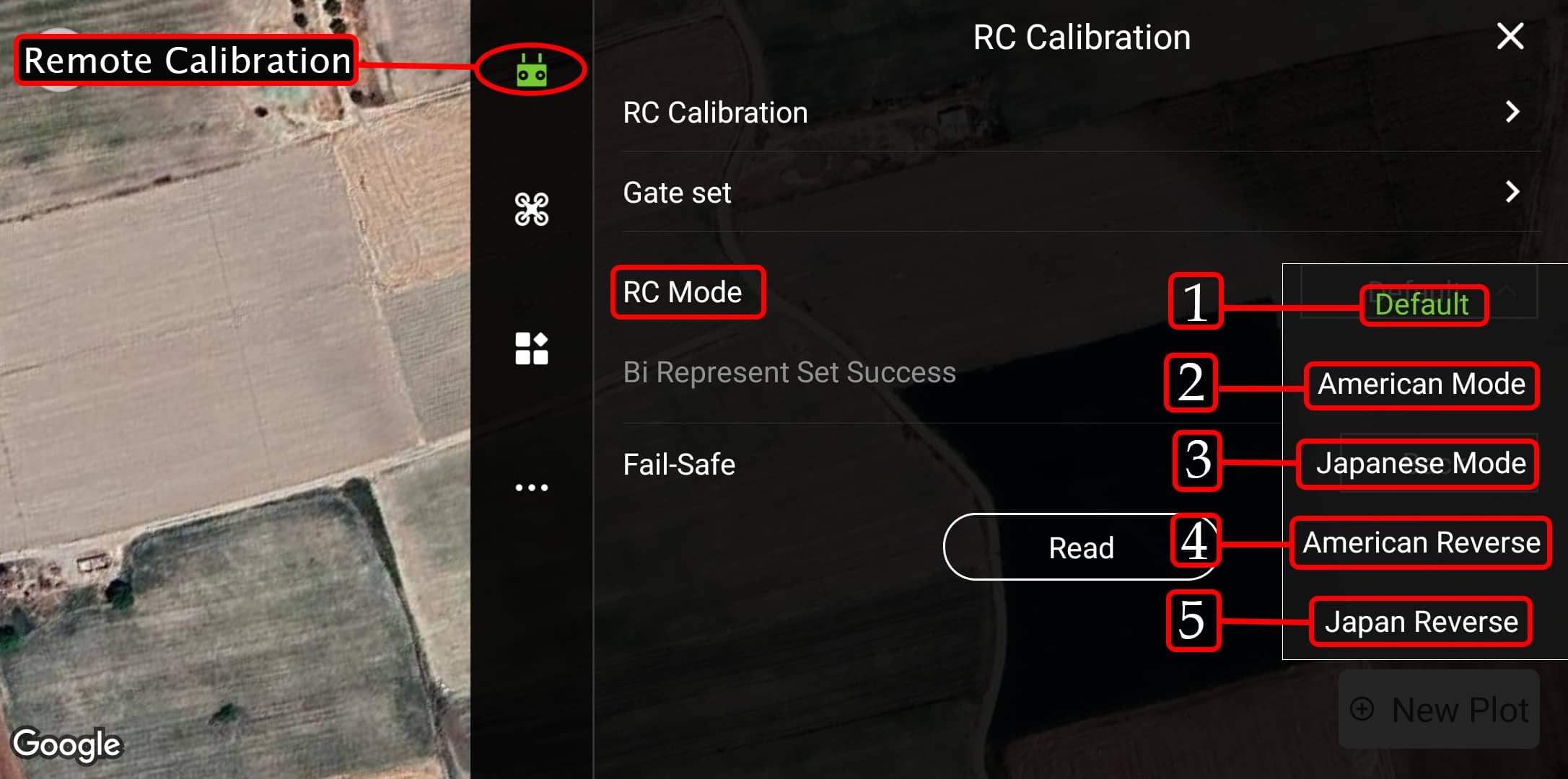
RC Mode :
مد کنترل به صورت پیشفرض بر روی حالت“Defult”تنظیم شده است که شامل موارد زیر است :
- Default
- American Mode
- Japanese Mode
- American Reverse
- Japan Reverse
Default :
در این حالت، تنظیمات جویاستیکها بهصورت استاندارد و عمومی است و در اکثر سیستمها بهعنوان حالت پیشفرض استفاده میشود. در این حالت :
- جویاستیک سمت راست برای کنترل Roll (چرخش حول محور طولی) و Pitch (چرخش حول محور عرضی) استفاده میشود.
- جویاستیک سمت چپ برای کنترل Throttle (قدرت موتور یا ارتفاع) و Yaw (چرخش حول محور عمودی) استفاده میشود.
American Mode (حالت آمریکایی) :
مشابه حالت پیشفرض، این حالت برای کاربران آمریکایی طراحی شده و در آن Roll و Pitch توسط جویاستیک سمت راست، و Yaw و Throttle با جویاستیک سمت چپ کنترل میشود.
Japanese Mode (حالت ژاپنی) :
در این حالت، نحوه تخصیص کنترلها بهطور معکوس از حالت آمریکایی است. بهطور معمول، Yaw و Roll توسط جویاستیک سمت راست کنترل میشوند، در حالی که Pitch و Throttle با جویاستیک سمت چپ تنظیم میشوند.
American Reverse (حالت معکوس آمریکایی) :
در این حالت، مشابه به حالت آمریکایی است، اما جهت کنترلها معکوس شده است. این ممکن است برای کسانی مفید باشد که نیاز به تنظیمات خاصتری دارند.
Japanese Reverse (حالت معکوس ژاپنی) :
مشابه به حالت ژاپنی است، با این تفاوت که جهت کنترلها معکوس شده است. این حالت برای کسانی مناسب است که ترجیح میدهند کنترلها در جهت معکوس عمل کنند.
⚠️توصیه میشود تنظیمات نرمافزار را در حالت پیشفرض“Defult” نگه دارید و از تغییر حالتها خودداری کنید. این کار به بهبود عملکرد و اطمینان از سازگاری کامل نرمافزار کمک میکند.
زمانی که اتصال رادیو کنترل با پهپاد قطع میشود،چه باید کرد؟
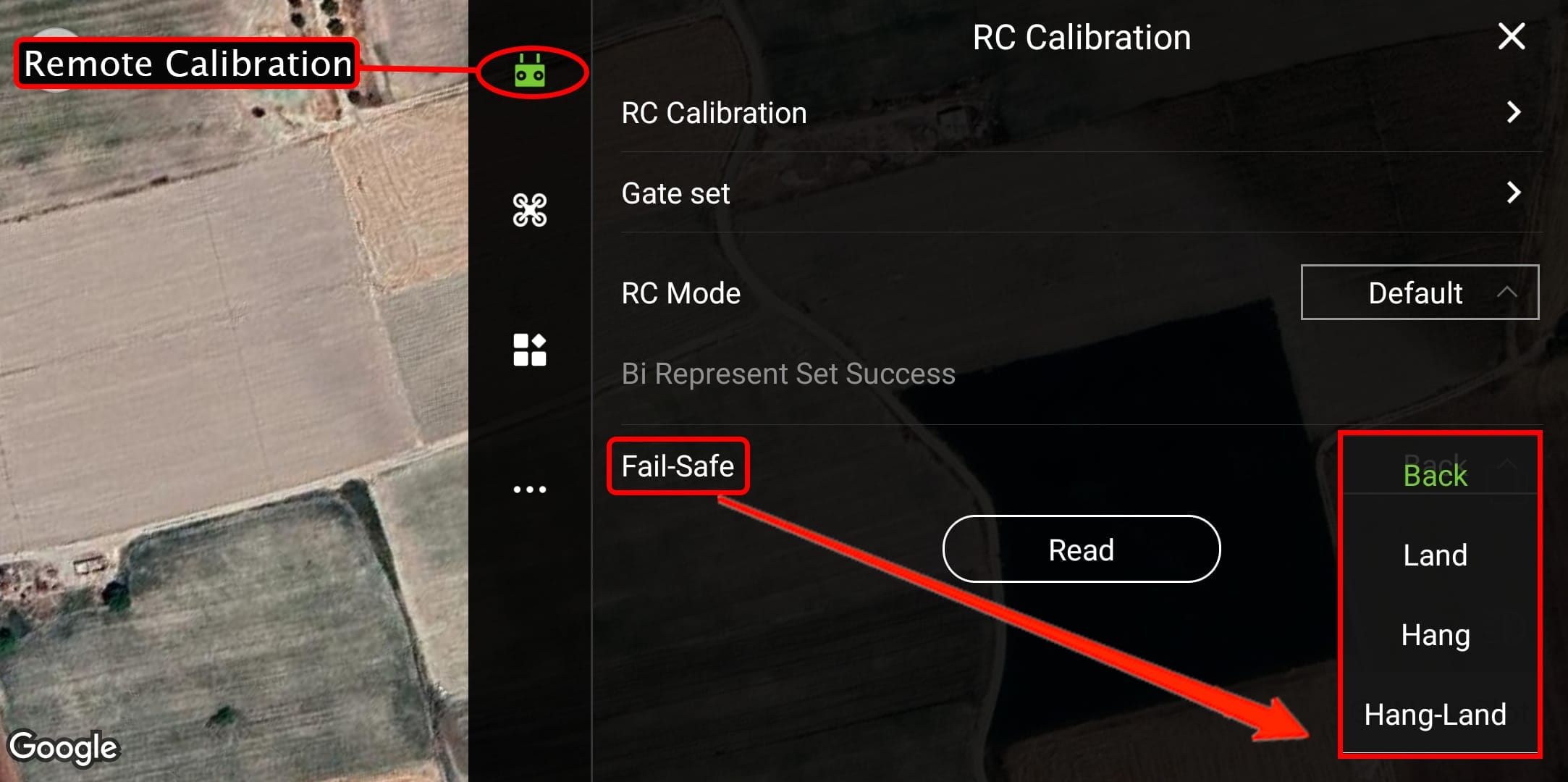
Fail_Safe :
- حالت بازگشت به نقطه شروع (Back) : پهپاد به سمت نقطهای که از آن پرواز را آغاز کرده،باز میگردد و در آنجا فرود میآید.
- حالت فرود خودکار (Land) : هنگامی که ارتباط با پهپاد قطع میشود،درحالت Land پهپاد به طور خودکار در مکان قطع ارتباط فرود میآید.
- حالت معلق ماندن (Hang) : پهپاد در همان موقعیت خود معلق میماند تا دوباره به آن متصل شوید.
- حالت hang-land : پهپاد در همان موقعیت خود معلق میماند و منتظر دستور بعدی شما میماند. اگر دستوری دریافت نکند، پس از مدتی به صورت خودکار فرود میآید.
این حالتها چالشهایی به همراه دارند که استفاده از آنها را غیرمناسب میکند :
- حالت Land : ممکن است محل فرود مناسب نباشد(مثلاً روی آب یا مانعی قرار بگیرد).
- حالت Hang : احتمال تخلیه کامل باتری وجود دارد، خصوصاً اگر متوجه قطع ارتباط نشوید.
- حالت hang-land : ترکیبی از دو حالت hang و land است،
- حالت Back : زمانی بهترین گزینه است که قبل از فعالسازی این گزینه، موانع و ارتفاعاتی که در مسیر پهپاد قرار دارند، شناسایی و برطرف شوند. همچنین، باید به پهپاد خود ارتفاع کافی بدهید تا در مسیر بازگشت به خانه با هیچ مانعی برخورد نکند و مسیر آن از موانع مختلف مانند درختان، ساختمانها یا سایر ارتفاعات آزاد باشد. این اقدام به جلوگیری از برخورد و ایجاد آسیب به پهپاد کمک میکند و بازگشت آن را به خانه با ایمنی بیشتر تضمین میکند.
⚠️توصیه میشود قبل از هر پرواز،حالت Fail-Safe مناسب را بر اساس شرایط پروازی و محیط انتخاب کنید. حالت بازگشت به نقطه شروع (Back) زمانی بهترین گزینه است که پیش از آن، موانع و ارتفاعاتی که در مسیر پهپاد قرار دارند، شناسایی و رفع شده باشند.
Parameters Settings :
پارامترهای تنظیمات به مجموعهای از مقادیر و گزینههایی گفته میشود که رفتار و عملکرد یک سیستم را تعیین میکنند.
در این سیستم خاص، پارامترهای تنظیمات شامل تنظیمات مرتبط با :
Sensor : مانند حساسیت، دقت و کالیبراسیون.
Battery : مانند میزان مصرف انرژی، حالتهای شارژ و هشدارهای باتری.
Spray : مانند میزان پاشش، فاصله و الگوی پاشش.
Parameters : مانند سرعت، ارتفاع، مسیر پرواز و حالتهای پروازی.
این پارامترها از طریق رابط کاربری تنظیمات قابل دسترسی و تغییر هستند و به کاربر امکان میدهند تا سیستم را مطابق با نیازهای خود شخصیسازی کند.
Sensor :
در پهپادها، سنسورها بهعنوان ابزارهایی برای اندازهگیری وضعیت و شرایط محیطی عمل میکنند و اطلاعات مهمی مانند شتاب، سرعت، جهت، و موقعیت را به سیستم کنترل پرواز ارسال میکنند. این دادهها به پهپاد کمک میکند تا در محیطهای پیچیده و متغیر بهطور دقیق حرکت کرده و عملکرد بهتری داشته باشد.
کالیبراسیون سنسورها در پهپادها :
کالیبراسیون سنسورها در پهپاد مانند تنظیم دقیق یک قطبنما است. همانطور که برای استفاده از قطبنما باید آن را بهطور صحیح و دقیق تنظیم کنید تا جهت شمال را به درستی نشان دهد، سنسورهای پهپاد نیز باید به درستی کالیبره شوند تا اطلاعات دقیق و قابل اعتمادی به سیستم کنترل پرواز ارسال کنند. این تنظیمات باعث میشود که پهپاد بتواند موقعیت، جهتگیری و وضعیت خود را بهطور صحیح درک کرده و در فضا بهدرستی حرکت کند.
پهپادها به دو نوع سنسور اصلی مجهز هستند :
- سنسور شتاب سنج (Accelerometer)
- سنسور قطب نما سنج (Compass Calibration)
چرا کالیبراسیون مهم است؟
- اگر سنسورها درست کالیبره نشوند، پهپاد ممکن است به اشتباه فرمانها را اجرا کند و باعث بروز مشکل شود.
- کالیبراسیون منظم به افزایش ایمنی و عملکرد بهتر پهپاد کمک میکند.
برای کالیبراسیون سنسورهای پهپاد،شما دو انتخاب اصلی دارید که هرکدام بسته به نیاز و شرایط شما، روش مناسبی خواهند بود.این دو روش، به شما این امکان را میدهند که سنسورها را با دقت و راحتی هرچه بیشتر تنظیم کنید و عملکرد بهینه دستگاه را تضمین نمایید :
- کالیبراسیون دستی
- کالیبراسیون خودکار
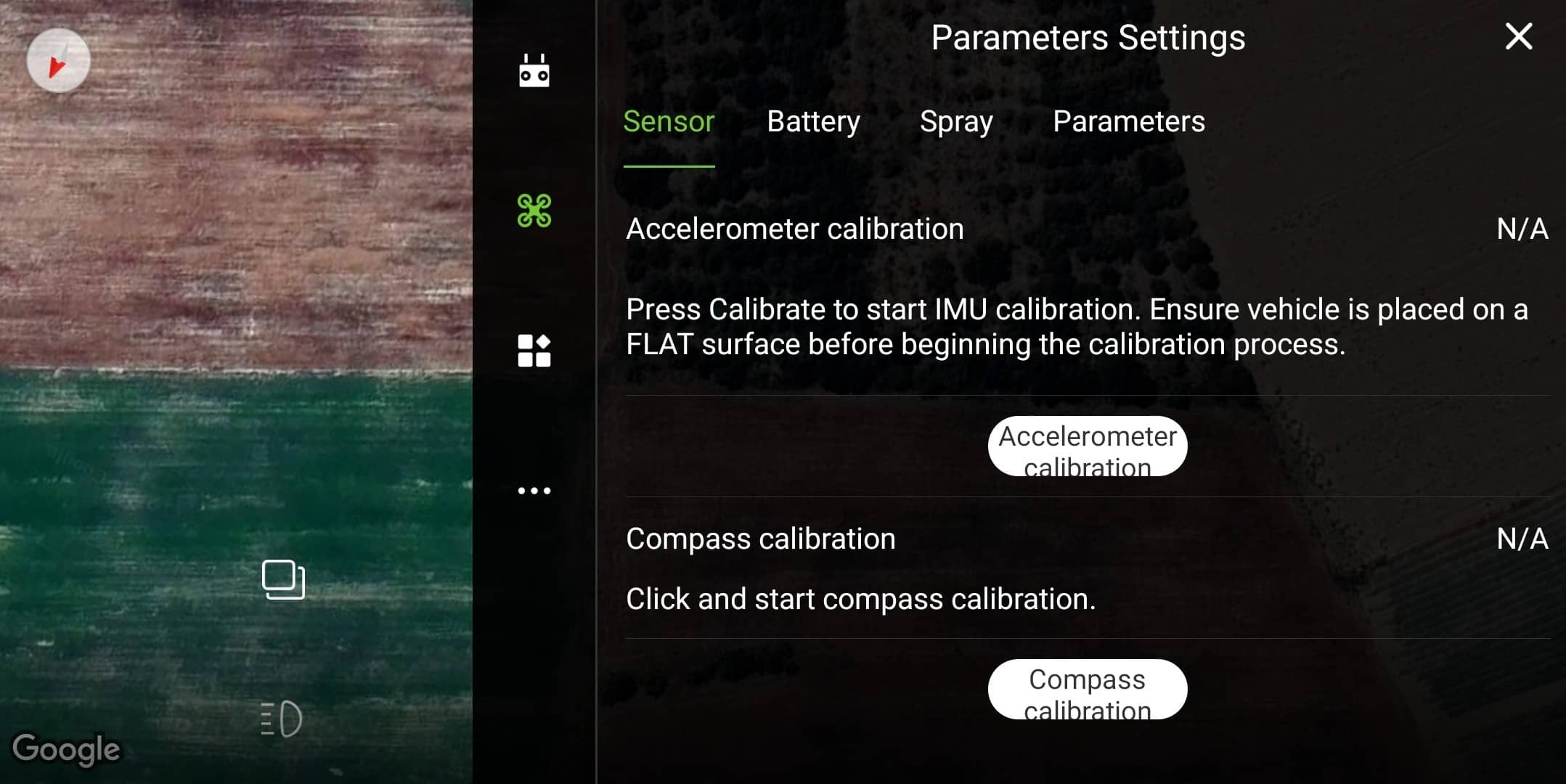
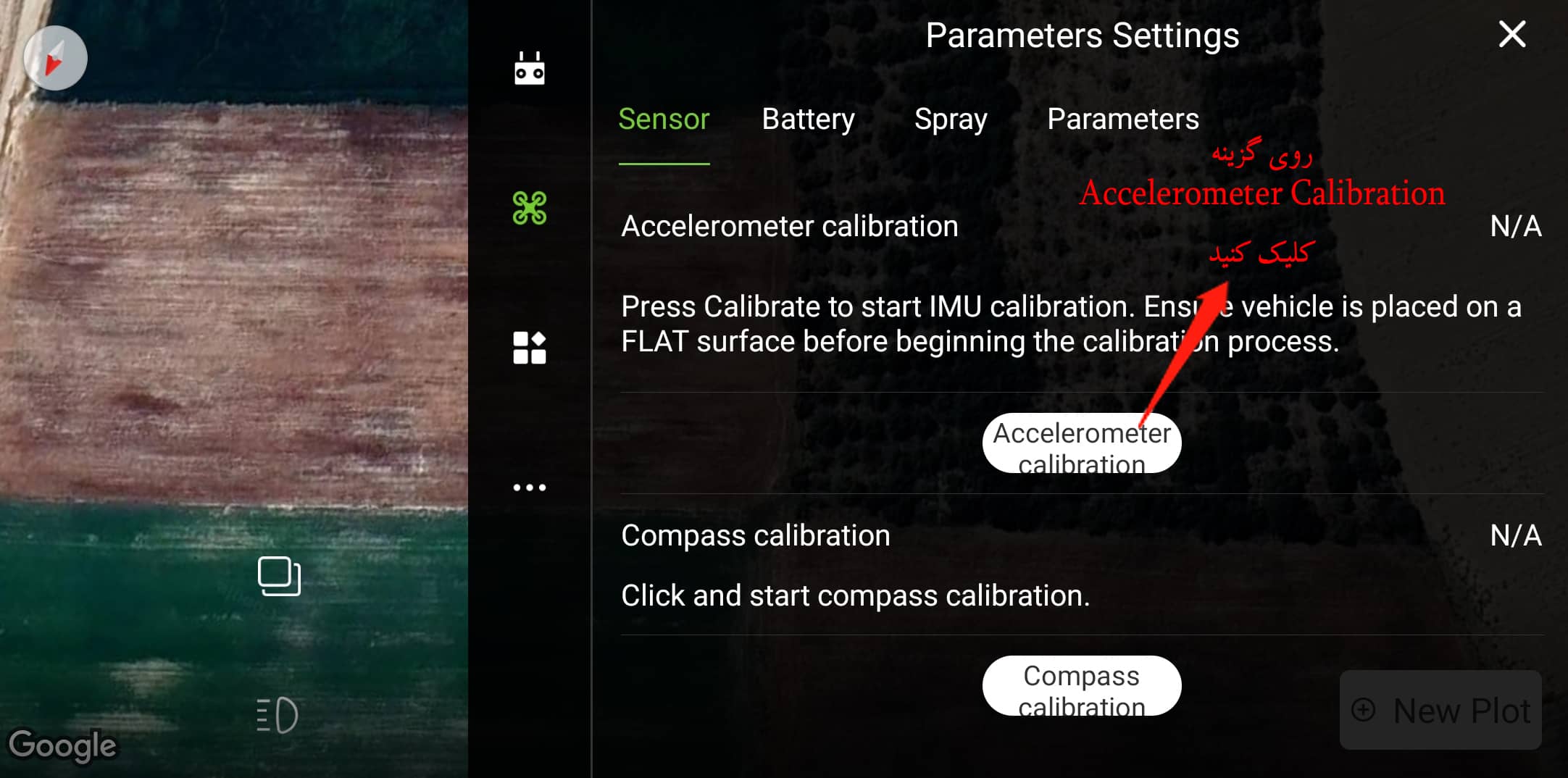
سنسورشتابسنج :
سنسورشتابسنج (Accelerometer)،اطلاعاتی در مورد وضعیت پهپاد ارائه میدهد. در صورت قرارگیری شتابسنج در وضعیت “نرمال (Normal)”، نیازی به کالیبراسیون نیست. اما در صورت مشاهده وضعیت “غیرنرمال(UnNormal)”،با فشردن دکمه مربوطه، واحد اندازهگیری IMU (Accelerometer) که شامل شتابسنج نیز میشود، کالیبره خواهد شد.
شتاب سنج چیست و چرا باید کالیبره شود؟
- شتابسنج : این سنسور مثل یک گوش حساس است که حرکت پهپاد را در جهات مختلف حس میکند.
- چرا باید کالیبره شود؟ برای اینکه پهپاد بداند بالا میرود، پایین میآید یا کج میشود، باید این سنسور درست تنظیم شود.
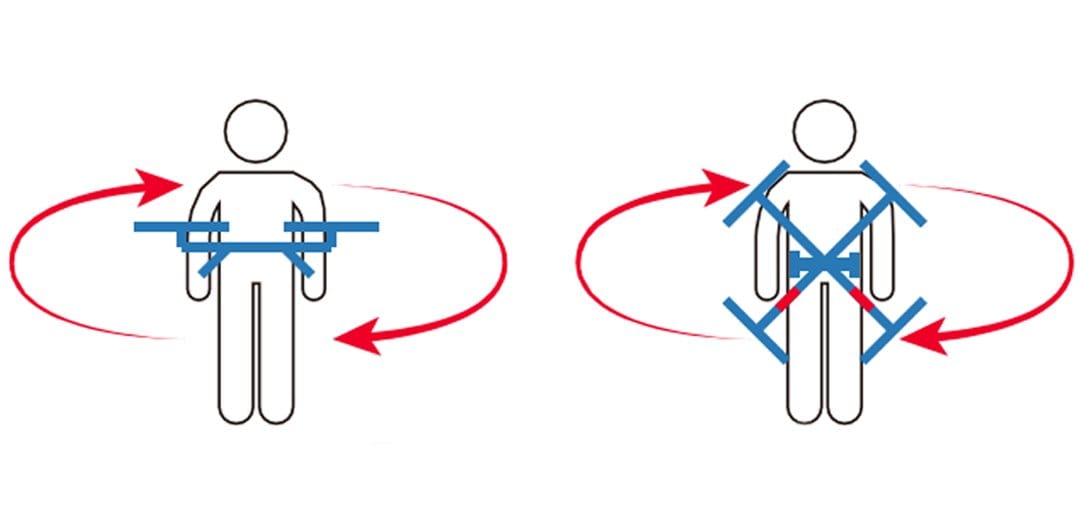
کالیبراسیون دستی : برای شروع فرآیند،ابتدا سوئیچ حالت مد را 3 تا 5 بار بچرخانید تا چراغ LED نشان دهد که چراغ زرد به طور مداوم روشن است. در این حالت، پهپاد وارد مرحلهی کالیبراسیون افقی میشود.
کالیبراسیون افقی :
در این مرحله، پهپاد باید در وضعیت افقی قرار گیرد. برای انجام کالیبراسیون افقی، محور پهپاد باید در جهت عقربههای ساعت بچرخد تا زمانی که چراغ سبز به طور مداوم روشن شود. این نشاندهنده تکمیل کالیبراسیون افقی است.
کالیبراسیون عمودی :
پس از تکمیل کالیبراسیون افقی، پهپاد وارد مرحلهی کالیبراسیون عمودی میشود. در این مرحله، باید پهپاد را به سمت پایین (سر به سمت زمین) بچرخانید و محور را در جهت عقربههای ساعت بچرخانید. چراغهای قرمز،سبز و زرد باید به طور متناوب چشمک بزنند و زمانی که این چراغها به طور متناوب چشمک زدند، کالیبراسیون عمودی کامل میشود.
اگر چراغ قرمز به طور مداوم روشن باشد،به این معنی است که کالیبراسیون به درستی انجام نشده و باید دوباره این فرآیند را تکرار کنید.
کالیبراسیون خودکار : برای کالیبره کردن شتابسنج، ابتدا پهپاد را به صورت افقی روی یک سطح صاف قرار دهید. سپس، برنامه Agri Assistent را باز کرده و به بخش کالیبراسیون شتابسنج بروید. با کلیک روی گزینه “Accelerometer Calibration”، فرآیند کالیبراسیون آغاز میشود. پس از گذشت حدود 8 ثانیه، پیام “Completed”بر روی نمایشگر رادیو کنترل نمایش داده خواهد شد،که نشاندهنده تکمیل موفقیتآمیز فرایند کالیبراسیون است.
نکته : اگر پس از اتمام مراحل کالیبراسیون، پیام “Completed” را مشاهده نکردید، به این معنی است که فرایند کالیبراسیون به درستی انجام نشده است. پس لطفا ، مراحل کالیبراسیون را مجدداً تکرار کنید.
⚠️پس دقت کنید،اگر دستگاه نیاز به تنظیم مجدد داشته باشد، یک هشدار قرمز رنگ در بالای صفحه ظاهر میشود. این هشدار به شما یادآوری میکند که قبل از شروع کار،باید مراحل کالیبراسیون را انجام دهید. تا زمانی که این تنظیمات انجام نشود، امکان استفاده از دستگاه وجود نخواهد داشت.
مرحله وضعیت چراغ LED توضیحات شروع کالیبراسیون چراغ زرد ثابت نشاندهنده شروع فرآیند کالیبراسیون و ورود به کالیبراسیون افقی. کالیبراسیون افقی چراغ سبز ثابت نشاندهنده تکمیل کالیبراسیون افقی و آماده بودن برای کالیبراسیون عمودی. کالیبراسیون عمودی چراغهای قرمز، سبز و زرد چشمکزن نشاندهنده انجام کالیبراسیون عمودی و پردازش اطلاعات سنسور. خطا در کالیبراسیون چراغ قرمز ثابت نشاندهنده این است که کالیبراسیون به درستی انجام نشده و باید دوباره انجام شود.
⚠️حتماً در حین کالیبراسیون به نحوه روشن شدن و چشمک زدن چراغهای LED توجه کنید.
⚠️دقت کنید که پس از هر کالیبراسیون، پهپاد را یک بار خاموش و روشن کنید تا تغییرات اعمال شده به درستی فعال شوند.
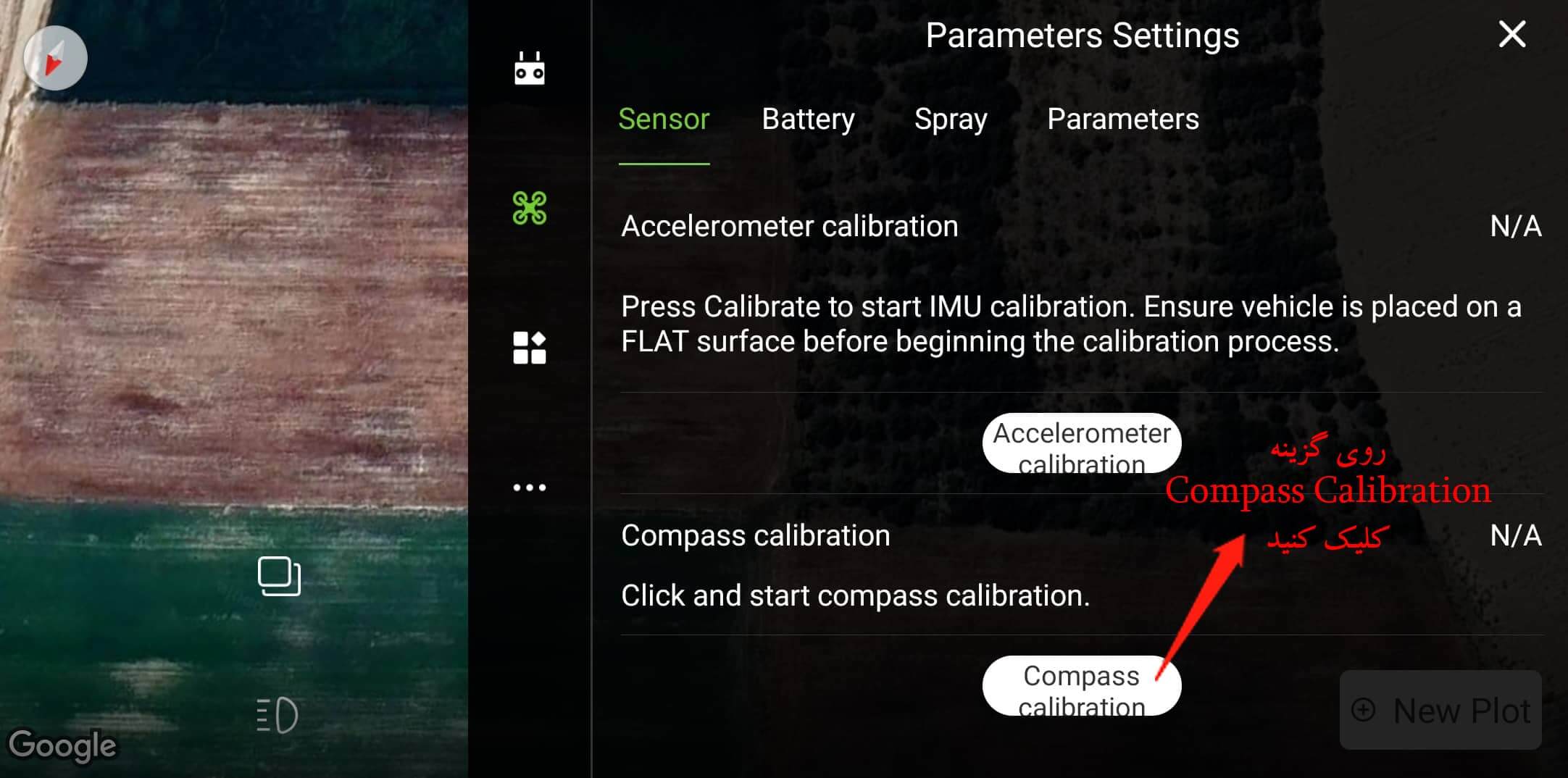
سنسور قطبنما سنج :
سنسور قطبنما سنج (Compass) وظیفهی ارزیابی وضعیت و جهتگیری پهپاد را بر عهده دارد. این سنسور به پهپاد اطلاعات دقیقتری در مورد موقعیت و وضعیت خود میدهد.
- وضعیت نرمال (Normal) : زمانی که قطبنما سنج در حالت نرمال قرار دارد، به این معنی است که سنسور به درستی کار میکند و نیازی به کالیبراسیون مجدد ندارد. در این وضعیت، پهپاد میتواند با دقت در فضا حرکت کند.
- وضعیت غیرنرمال (UnNormal) : در صورتی که قطبنما سنج درحالت غیرنرمال قرار گیرد، ممکن است خطایی در عملکرد سنسور وجود داشته باشد یا شرایط محیطی تأثیرگذار باشد. در این حالت، برای اصلاح وضعیت و اطمینان از دقت سنسور، نیاز به کالیبراسیون است. این کار معمولاً با فشردن دکمه مخصوص کالیبراسیون (Compass) انجام میشود تا سنسور مجدداً تنظیم شود و به وضعیت نرمال بازگردد.
⚠️اگر دستگاه نیاز به کالیبراسیون داشته باشد، یک هشدار قرمز رنگ در بالای صفحه ظاهر میشود و تا زمانی که کالیبراسیون انجام نشود، نمیتوانید از دستگاه استفاده کنید.
قطب نما سنج چیست و چرا باید کالیبره شود؟
- قطب نما سنج : یک سنسور مغناطیسی است که به پهپاد این امکان را میدهد تا جهت خود را شناسایی کرده و در فضا بهدرستی حرکت کند. این سنسور اطلاعات دقیقی در مورد موقعیت و جهتگیری پهپاد به سیستم کنترل پرواز ارسال میکند.
- چرا باید کالیبره شود؟ برای اینکه پهپاد بداند به کدام سمت میرود، باید این سنسور درست تنظیم شود.
همانطور که در مورد کالیبراسیون دستی شتابسنج گفتیم،کالیبراسیون دستی قطبنمای مغناطیسی در پهپاد نیز به دو مرحلهی اصلی تقسیم میشود :
- کالیبراسیون افقی
- کالیبراسیون عمودی
کالیبراسیون افقی و عمودی قطبنماسنج به همان روشی که در شتابسنج گفته شد، صورت میگیرد.
پس دقت کنید که این فرآیند باید در فضای باز و دور از هرگونه منبع اختلال مغناطیسی مانند خطوط برق، ساختمان،و وسایل الکترونیکی انجام شود تا اطمینان حاصل شود که قطبنما تنها میدان مغناطیسی زمین را تشخیص میدهد.
کالیبراسیون خودکار : پس از تکمیل این مراحل، نرمافزار Agri Assistant را اجرا کرده و گزینه“Compass Calibration” را انتخاب نمایید. پس از 8 ثانیه، پیام“Completed”بر روی نمایشگر رادیو کنترل نمایش داده میشود که نشاندهنده تکمیل موفقیتآمیز فرایند کالیبراسیون است.
نکته : اگر پس از اتمام مراحل کالیبراسیون، پیام “Completed” را مشاهده نکردید، به این معنی است که فرایند کالیبراسیون به درستی انجام نشده است. پس لطفا مراحل کالیبراسیون را مجدداً تکرار کنید.
Battery :
در این بخش از تنظیمات، شما میتوانید اطلاعات مربوط به وضعیت باتری پهپاد از جمله آلارمها و هشدارهای مربوط به ولتاژ و تنظیمات کالیبراسیون باتری را مشاهده کنید. این تنظیمات شامل موارد زیر میشود :
- Low Voltage Protection
- Low Voltage Alarm
- Voltage Colibration
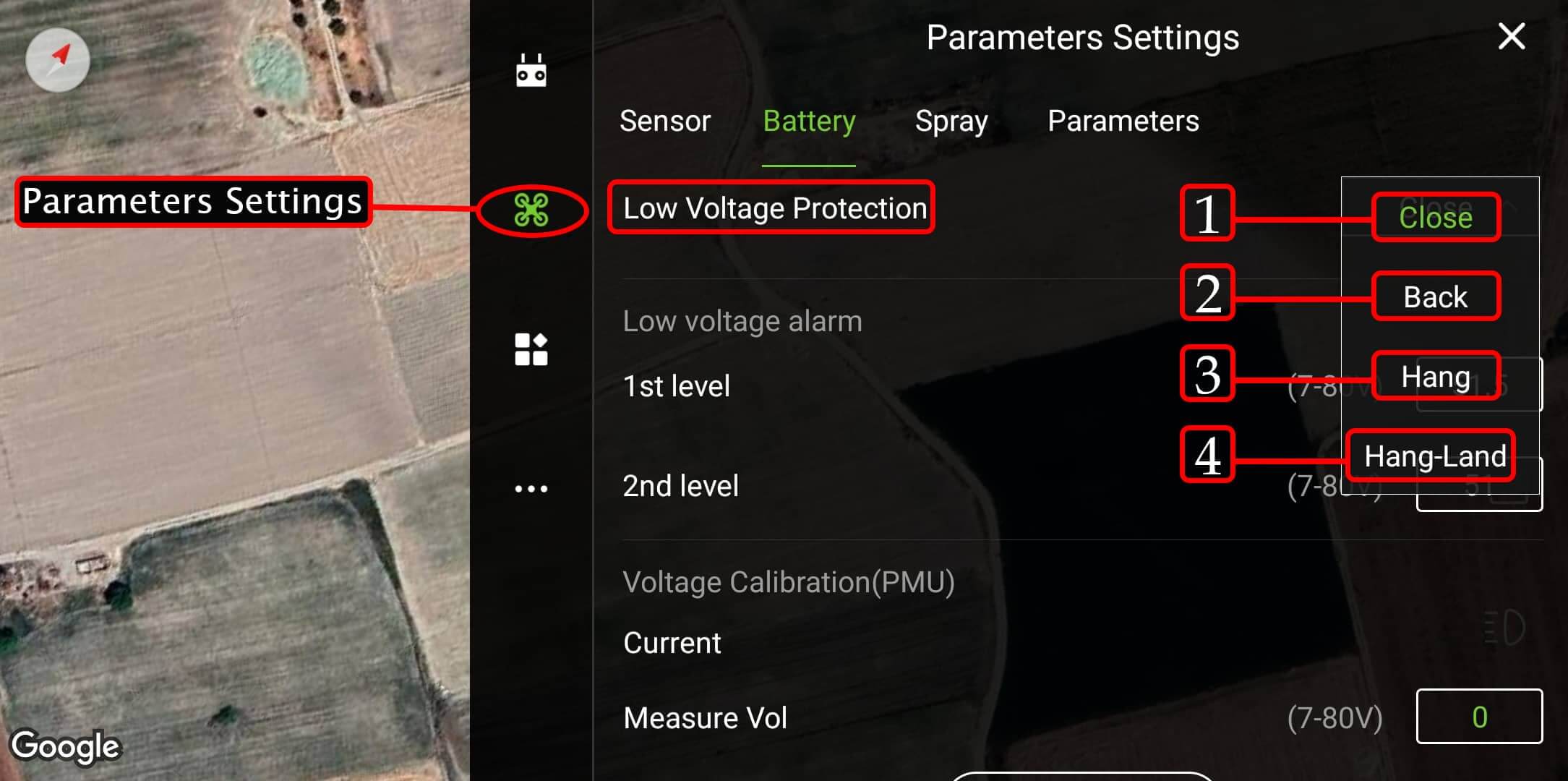
Low Voltage Protection :
حالت Low Voltage Protection زمانی فعال میشود که میزان شارژ باتری پهپاد به حد بحرانی نزدیک میشود.در این وضعیت، پهپاد به طور خودکار اقدامات حفاظتی را که تنظیم کرده باشید را انجام میدهد.
- Close : پهپاد فعالیت خود را متوقف می کند.
- Back : پهپاد به نقطهی اولیهای که از آنجا پرواز را آغاز کرده، باز میگردد و در آن محل فرود میآید.
- Hang : پهپاد در این حالت به طور ثابت در موقعیت خود معلق میماند تا زمانی که دوباره بتوانید به آن دستور دهید.
- Hang-Land : در این وضعیت، پهپاد برای مدتی معلق میماند و منتظر دریافت دستور بعدی از شما خواهد بود. اگر در این مدت دستوری دریافت نکند و شارژ باتری روبه اتمام باشد، به صورت خودکار فرود خواهد آمد.
زمانی که آلارم هشدارباتری فعال می شود وضعیت پهپاد به چه صورت است ؟
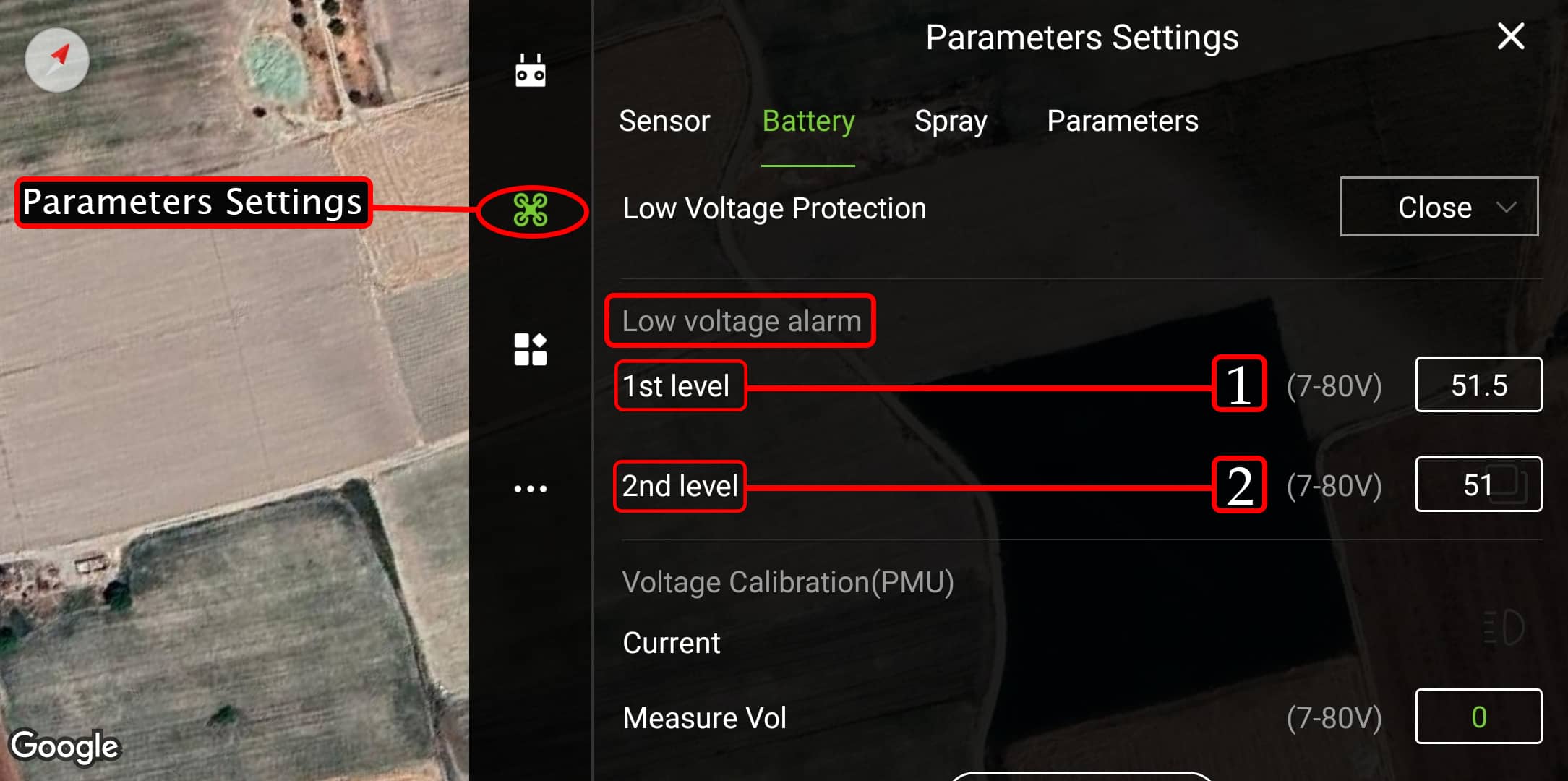
Low Voltage Alarm :
Low Voltage Alarm به سیستم یا قابلیتی گفته میشود که برای نظارت و هشدار دادن در مورد کاهش ولتاژ باتری به کار میرود. این سیستم به کاربران اجازه میدهد تا از کاهش ولتاژ باتری قبل از رسیدن به سطحی که به سلامت و عمر باتری آسیب وارد کند، آگاه شوند. در این سیستم دو سطح هشدار برای ولتاژ پایین تعریف میشود: سطح اول (1st level) که هشدار اولیه را اعلام میکند و سطح دوم (2nd level) که هشدار بحرانی را نشان میدهد.
ولتاژ استوریج :
ولتاژ استوریج (Storage Voltage) به ولتاژی گفته میشود که یک باتری باید در هنگام ذخیرهسازی یا نگهداری برای مدت زمان طولانی به آن برسد تا از آسیب به سلولهای باتری جلوگیری شود. برای باتریهای لیتیوم-یون، ولتاژ استوریج معمولاً بین 3.7 ولت تا 3.8 ولت برای هر سلول است. این ولتاژ معمولاً برای باتریهای 12 سلول معادل 44.4 ولت و برای باتریهای 14 سلول معادل 51.8 ولت است.
فرمول محاسبه ولتاژ ذخیرهسازی (Storage Voltage) :
اگر بخواهید ولتاژ ذخیرهسازی یک باتری را برای باتری با تعداد سلول مشخص محاسبه کنید، فرمول ساده به این صورت است:
ولتاژ ذخیرهسازی باتری = تعداد سلولها × ولتاژ هر سلول
- ولتاژ ذخیرهسازی باتری : ولتاژی که باتری هنگام ذخیرهسازی (شارژ کامل یا در حالت آماده به کار) دارد.
- تعداد سلولها : تعداد سلولهای باتری که معمولاً به صورت سری در کنار یکدیگر قرار گرفتهاند.
- ولتاژ هر سلول : ولتاژ هر سلول که معمولاً 3.7 ولت برای باتریهای لیتیوم-یون است.
باتریهای 12 سل و 14 سل :
باتری 12 سل :
- ولتاژ معمول هر سلول : 3.7 ولت
- ولتاژ استوریج (حدوداً) : 3.7 ولت × 12 سل = 44.4 ولت
باتری 14 سل :
- ولتاژ معمول هر سلول : 3.7 ولت
- ولتاژ استوریج (حدوداً) : 3.7 ولت × 14 سل = 51.8 ولت

در باتری های 14 سل،ولتاژ استوریج هر سلول 3.7 ولت،ولتاژ کل استوریج باتری 51.8 ولت (14 سلول × 3.7 ولت/سلول) است.
سطوح هشدار در سیستم Low Voltage Alarm :
- سطح اول هشدار (1st Level) : در این سطح، ولتاژ آستانهای برای هشدار اولیه تعیین میشود که معمولاً کمی پایینتر از ولتاژ استوریج باتری است تا حاشیه ایمنی ایجاد کند. در باتریهای 14 سلولی، این مقدار برابر با 51.5 ولت است. هنگامی که ولتاژ باتری به این مقدار میرسد، سیستم هشدار اولیه فعال میشود و کاربر از وضعیت کاهش ولتاژ آگاه میشود. این هشدار به کاربر این امکان را میدهد که اقدامات لازم برای جلوگیری از کاهش بیشتر ولتاژ را انجام دهد و از آسیب به باتری جلوگیری کند.
- سطح دوم هشدار (2nd Level) : سطح دوم هشدار به عنوان آستانه بحرانی در نظر گرفته میشود و زمانی که ولتاژ باتری به 51 ولت برسد، فعال میشود. این مقدار به معنای یک کاهش شدید در ولتاژ باتری است که میتواند منجر به آسیبهای جدی به سلولهای باتری و کاهش عمر مفید آنها شود. هشدار سطح دوم به کاربر اطلاع میدهد که ولتاژ به حد بحرانی رسیده و باید هر چه سریعتر اقدامات را انجام شود.
- جدول زیر، پارامترهای تنظیم هشدار ولتاژ پایین Low Voltage Alarm را برای باتریهای 12 و 14 سلول به تفصیل شرح میدهد. این پارامترها به منظور جلوگیری از تخلیه بیش از حد باتری و افزایش طول عمر آن، به دقت تنظیم شدهاند.
ویژگی باتریهای ۱۲ سلولی باتریهای ۱۴ سلولی ولتاژ استوریج هر سلول ۳.۷ ولت ۳.۷ ولت ولتاژ کل استوریج باتری ۴۴.۴ ولت ۵۱.۸ ولت سطح اول (1st Level) ۴۴.۰ ولت ۵۱.۵ ولت سطح دوم (2nd Level) ۴۳.۰ ولت ۵۱.۰ ولت توضیحات سطح اول هشدار در صورت کاهش ولتاژ به زیر ۴۴ ولت هشدار در صورت کاهش ولتاژ به زیر ۵۱.۵ ولت توضیحات سطح دوم هشدار در صورت کاهش ولتاژ به زیر ۴۳ ولت (آستانه بحرانی) هشدار در صورت کاهش ولتاژ به زیر ۵۱ ولت (آستانه بحرانی) توقف شارژ باتری بله، پس از رسیدن به آستانه بحرانی بله، پس از رسیدن به آستانه بحرانی
توجه مهم :
- در صورت کاهش ولتاژباتری به زیر آستانه بحرانی، فرآیند شارژ باتری متوقف میشود تا از آسیب بیشتر به سلولها جلوگیری شود. لذا، همواره باید به هشدارهای سیستم توجه نموده و از تخلیه بیش از حد مجاز باتری خودداری کرد.
- در هر دو حالت، پس از رسیدن به سطح دوم و کاهش ولتاژ به آستانه بحرانی،فرآیند شارژ متوقف میشود تا از آسیب به باتری جلوگیری گردد.
- توصیه میشود که همیشه به هشدارهای سیستم توجه کنید تا از تخلیه بیش از حد باتری و آسیب به سلولها جلوگیری شود.
چگونه میتوان ولتاژ واقعی باتری را با ولتاژ نمایش دادهشده در رادیو کنترل تنظیم کرد؟
Voltage Calibration :
کالیبراسیون باتری پهپاد، فرآیندی است که طی آن، ولتاژ نمایش داده شده توسط نرمافزار Agri Assistent پهپاد در مورد سطح شارژ باتری با واقعیت تطبیق داده میشود. این کار به شما کمک میکند تا از میزان شارژ باتری پهپاد خود به طور دقیق آگاه باشید و از تخلیه ناگهانی باتری جلوگیری کنید.
مراحل کالیبراسیون باتری پهپاد :
آمادهسازی :
- آمادهسازی مولتیمتر : یک مولتیمتر دقیق را آماده کنید تا ولتاژ باتری را اندازهگیری کنید.
اندازهگیری ولتاژ باتری :
- اتصال مولتیمتر : پروبهای مثبت و منفی مولتیمتر را به ترتیب به ترمینالهای مثبت و منفی باتری متصل کنید.
- خواندن ولتاژ : مولتیمتر ولتاژ فعلی باتری را نمایش میدهد. این مقدار را یادداشت کنید. برای مثال، فرض کنید ولتاژ اندازهگیری شده 40 ولت باشد.
ورود به نرمافزار Agri Assistent پهپاد :
- دسترسی به تنظیمات باتری : وارد برنامه Agri Assistant شوید و به بخش تنظیمات باتری بروید.
مقایسه ولتاژها :
- ولتاژ نمایش داده شده در نرمافزار : در این بخش،نرمافزار Agri Assistent ولتاژی را نمایش میدهد که ممکن است با ولتاژ اندازهگیری شده توسط مولتیمتر متفاوت باشد. برای مثال، فرض کنید نرمافزار ولتاژ 36 ولت را نشان دهد.
کالیبراسیون ولتاژ :
- تغییر مقدار ولتاژ : در قسمت مربوط به کالیبراسیون ولتاژ، مقدار نمایش داده شده در نرمافزار Agri Assistent را با ولتاژ دقیق اندازهگیری شده توسط مولتیمتر جایگزین کنید. در مثال ما، مقدار 36 ولت را با 40 ولت جایگزین میکنیم.
- ذخیره تغییرات : تغییرات اعمال شده را ذخیره کنید.
تایید کالیبراسیون :
- خروج و ورود مجدد : از نرمافزار خارج شده و مجدداً وارد شوید.
- بررسی مجدد ولتاژ : ولتاژ نمایش داده شده در نرمافزار را مجدداً بررسی کنید. این بار باید با ولتاژ اندازهگیری شده توسط مولتیمتر یکسان باشد.
راهکار پیشنهادی :
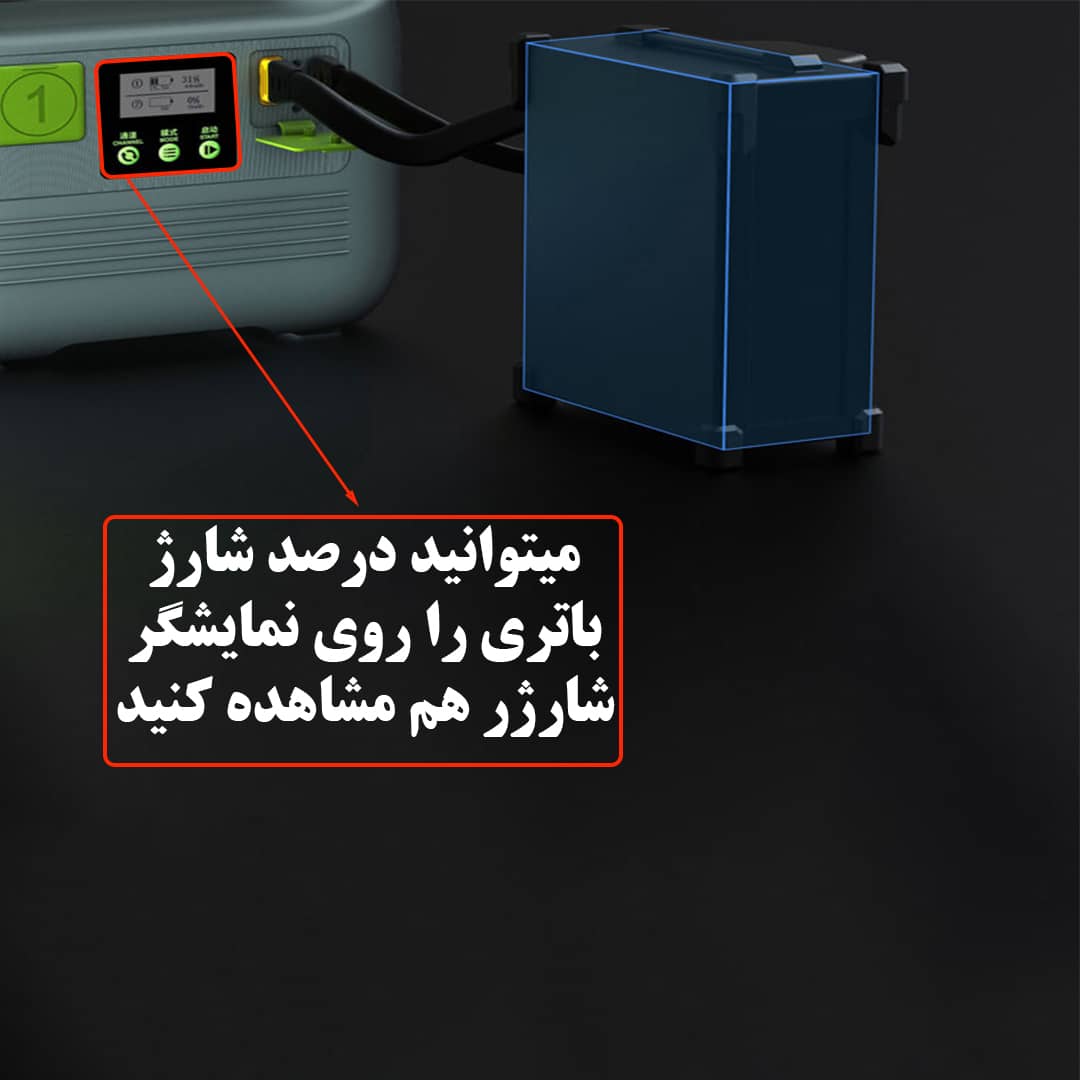
در تصویر زیر، ما از شارژر SKRC استفاده کردهایم تا به شما نمایش دهیم که چگونه میتوانید شارژ باتری را از روی نمایشگر شارژر مشاهده کنید.
اگر به مولتیمتر دسترسی ندارید، میتوانید به سادگی با استفاده از شارژر باتری، ولتاژ آن را بررسی کنید.کافیست باتری را به شارژر متصل کرده تا از میزان دقیق ولتاژ و وضعیت شارژ آن آگاه شوید. این روش، یک راهکار سریع و آسان برای نظارت بر سلامت باتری است.
چگونه به جای نمایش ولتاژ باتری به صورت ولت، آن را به صورت درصد مشاهده کنید؟
برای برخی از کاربران، به جای نمایش مستقیم ولتاژ باتری به صورت ولت (V)، میزان شارژ آن را به صورت درصد نشان میدهند. چون باتری را از طریق پورت CAN اتصال میدهند، این امر ممکن است باعث شود که جریان به طور مداوم کشیده شود و در نتیجه، در طول زمان ولتاژ باتری کاهش یابد. در این حالت، عددی که در نرمافزار به شما نمایش داده میشود، به صورت درصد خواهد بود. یکی از چالشهای این عملکرد این است که پس از مدتی، تنها تعدادی از باتریها قابلیت شارژ را حفظ می کنند و سایر باتریها به دلیل تخلیه کامل، از چرخه شارژ و دشارژ خارج می شوند. به همین دلیل، این روش توصیه نمیگردد.

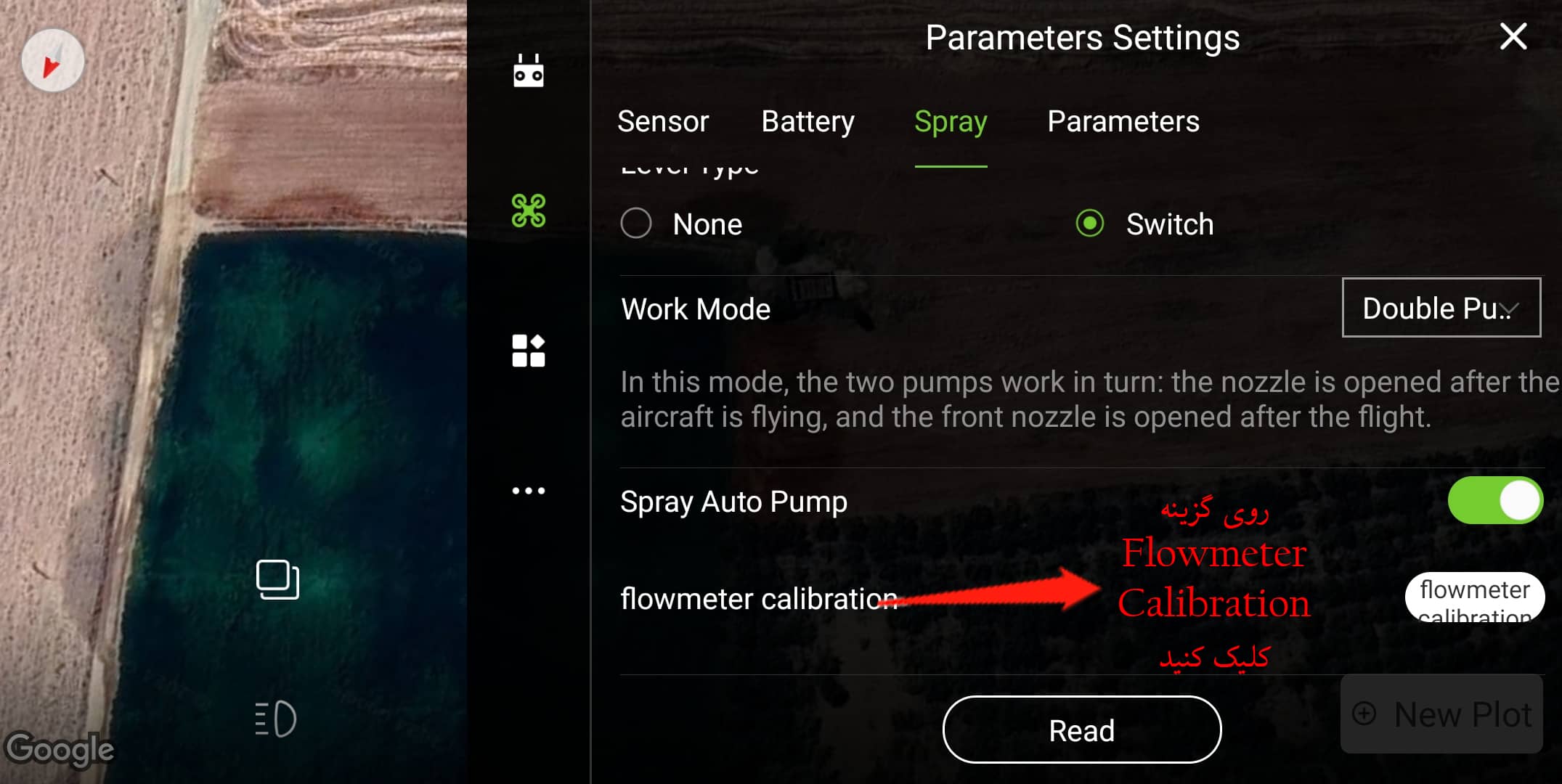
Spray :
سیستم پاشش خودکار محلول درمخزن که در آن پمپ اسپری، بهطور دقیق محلول درمخزن را توزیع میکند و تنظیمات کالیبراسیون فلومتر و جریان بهطور بهینه عمل میکنند. شامل موارد زیر است :
- Liq Protection
- Liquid Type
- Level Type
- Work Mode
- Spray Auto Pump
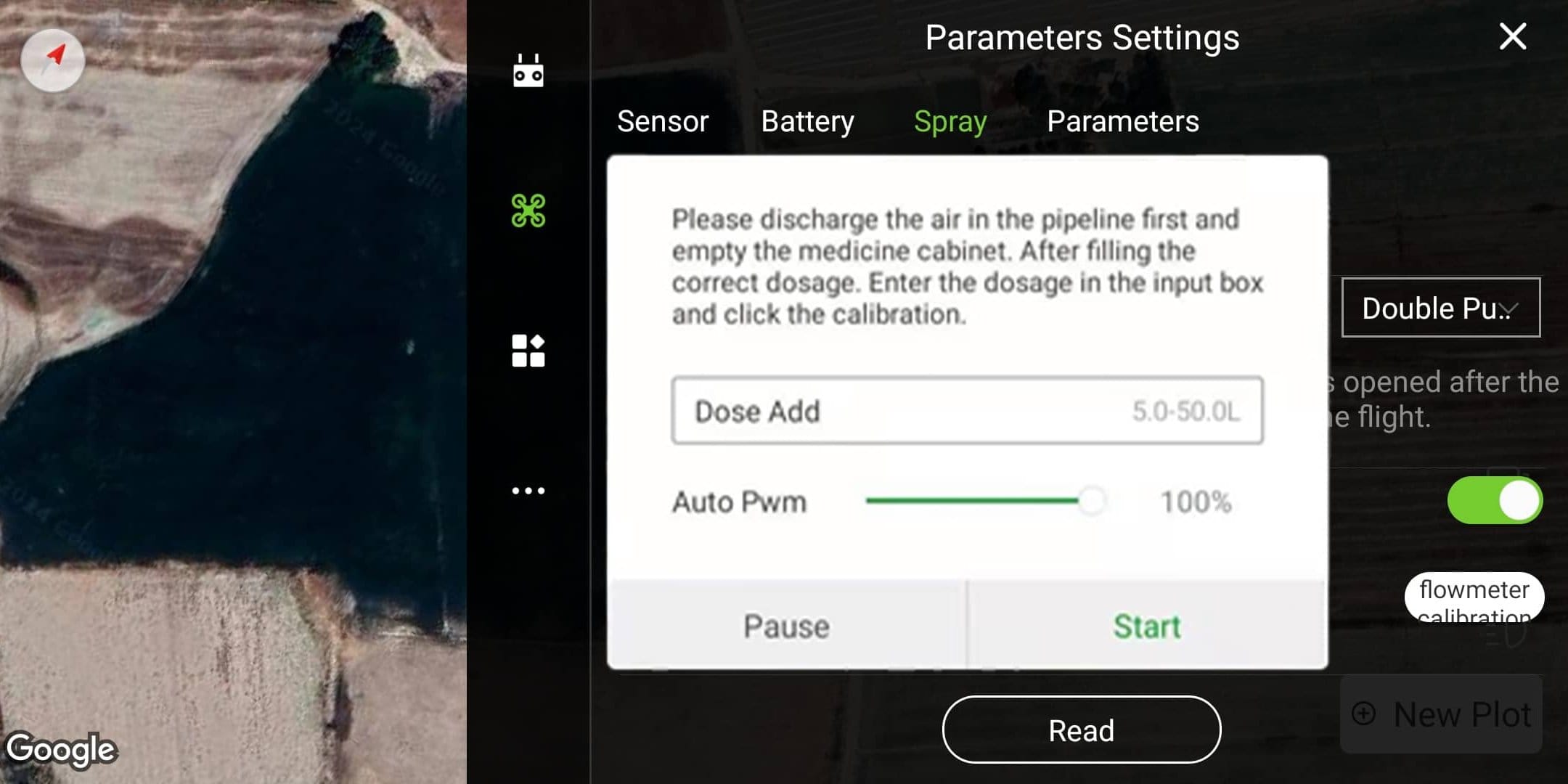
- Flowmeter Calibration
اگر محلول در مخزن تمام شود وضعیت پهپاد به چه صورت است ؟
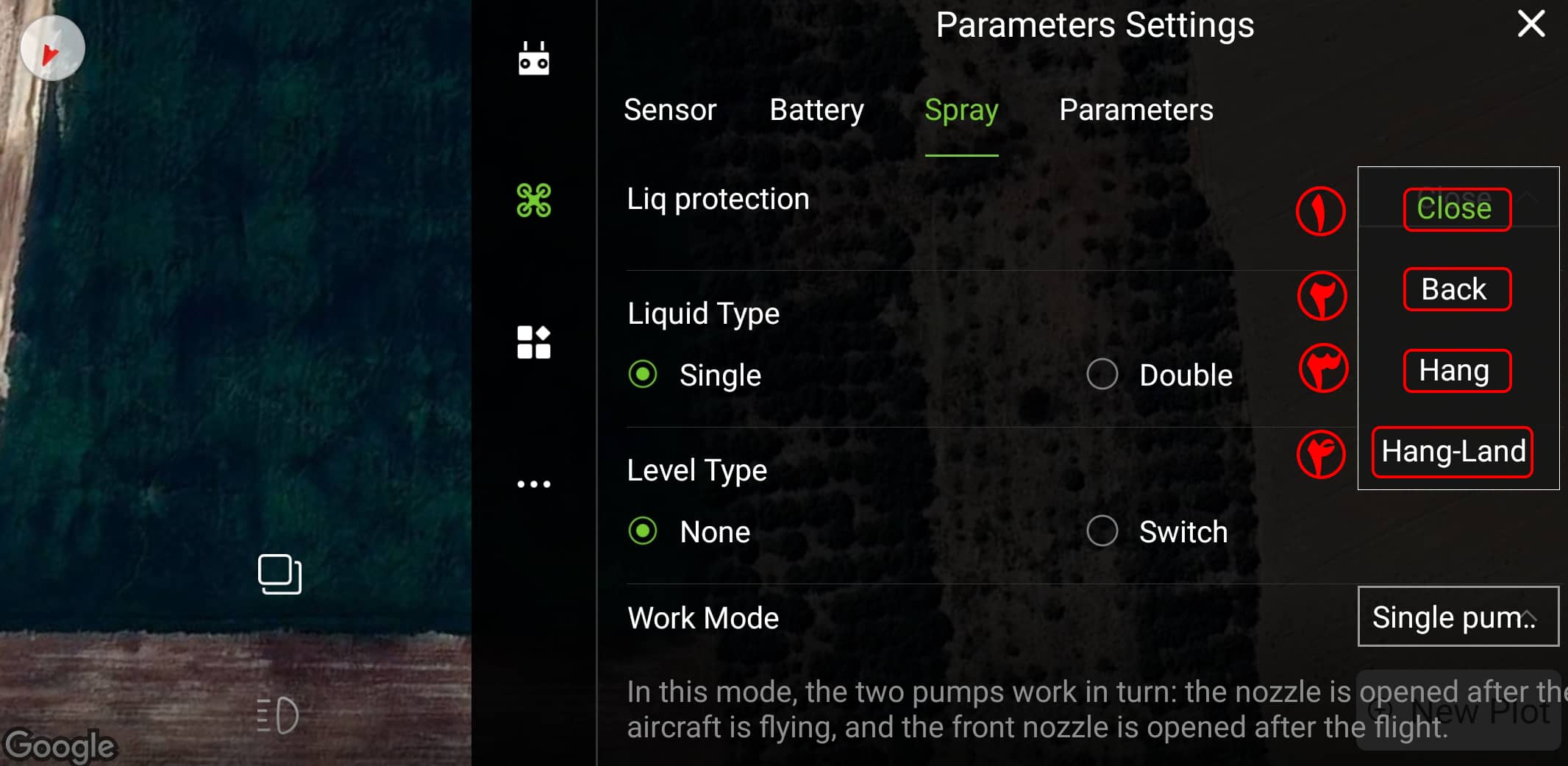
Liq Protection :
در بخش تنظیمات اسپری، میتوانید مشخص کنید که اگر محلول اسپری تمام شد، پهپاد چه واکنشی نشان دهد. گزینههای موجود عبارتند از :
- Close : پهپاد فعالیت را متوقف می کند.
- Back : پهپاد به طور خودکار در محلی که پرواز را آغاز کرده، برمیگردد.
- Hang : پهپاد در همان مکانی که مایع اسپری را تمام کرده، معلق میماند.
- Hang-Land : پهپاد چند لحظه در هوا میماندو منتظر دستور شما می ماند اگر دستوری به او داده نشود سپس فرود میآید.
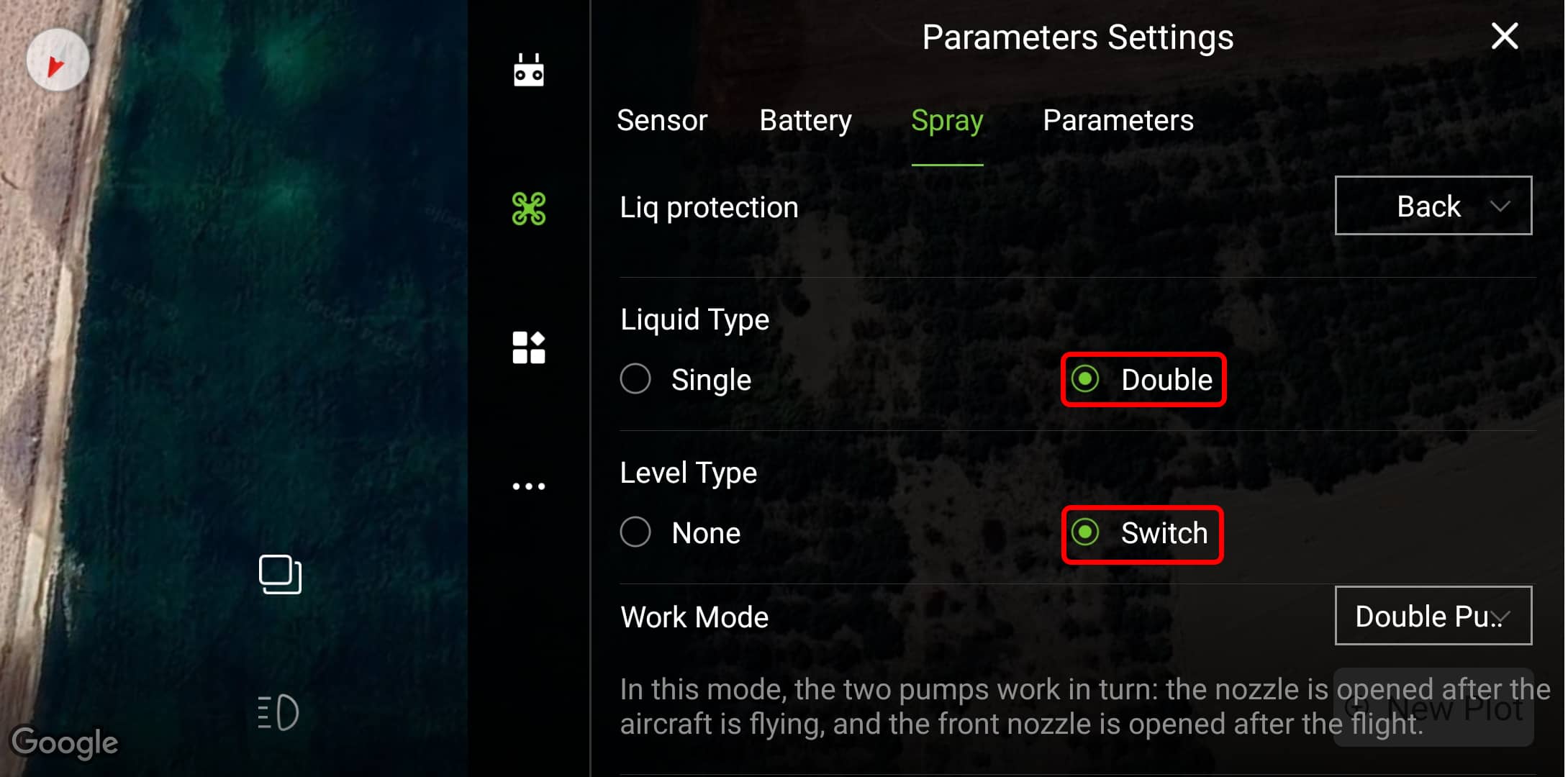
Level Type,Liquid Type :
در بخش Liquid Type، اگر از یک پمپ استفاده میکنید،گزینه Single را انتخاب کنید. اگر از دو پمپ استفاده میکنید،گزینه Double را انتخاب نمایید. همچنین، در بخش Level Type، اگر از رادار استفاده میکنید، گزینه Switch را انتخاب کنید.
Work Mode :
نتیجه گیری :
کالیبراسیون منظم و دقیق سنسورها و اجزای مختلف پهپاد، از جمله شتابسنج، قطبنما، باتری و سیستم پاشش، برای عملکرد بهینه و ایمن دستگاه ضروری است. تنظیم صحیح این سیستمها تضمین میکند که پهپاد در حین پرواز بدون خطا عمل کند، از بروز مشکلات جهتیابی و تعادل جلوگیری شود و باتری از آسیبهای ناشی از تخلیه بیش از حد محفوظ بماند. همچنین، کالیبراسیون فلومتر و پمپها در سیستم اسپری، دقت در توزیع محلول را بهبود میبخشد. توجه به این تنظیمات نهتنها به افزایش ایمنی پرواز کمک میکند، بلکه عمر مفید دستگاه را نیز افزایش داده و از بروز خرابیها و مشکلات در طول عملیات جلوگیری مینماید. برای کسب اطلاعات بیشتر در مورد تنظیمات پیشرفته و نحوه آشنایی با رادار و هر یک از اجزا، روی لینک زیر کلیک کنید و بخش دوم این مقاله را مطالعه نمایید.
بررسی منوی تنظیمات نرم افزار Agri Assistent قسمت دوم (بخش چهارم)